

-
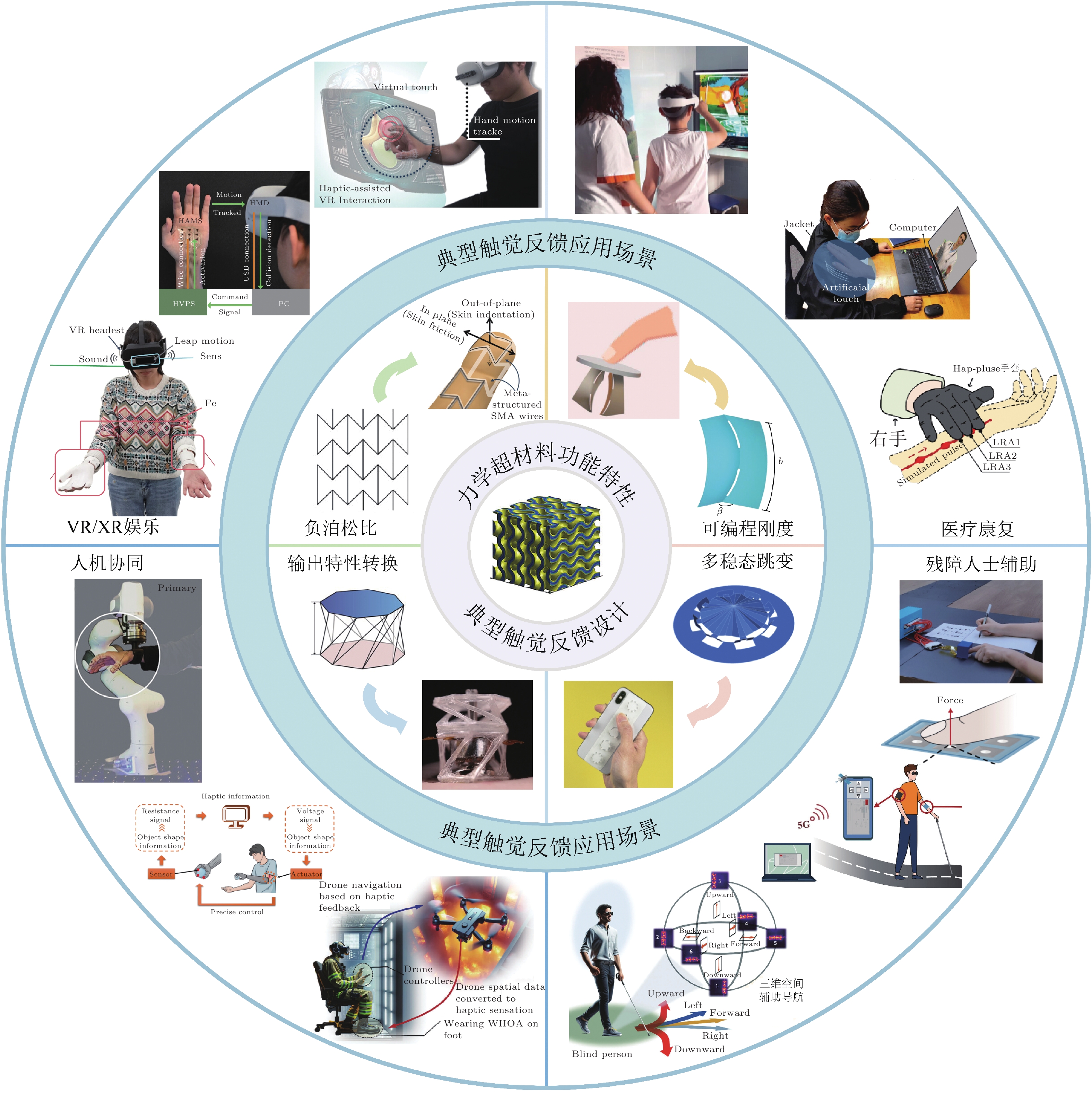
摘要: 触觉作为人类五大感官之一, 承载了大量环境交互、空间定位与物理感知等重要信息. 近年来, 随着人机交互技术的迅速发展, 如何高效、真实地再现触觉信息已成为构建沉浸式交互系统的核心问题. 然而, 传统触觉反馈设备普遍存在功能单一、复现度低、结构臃肿以及集成度不足等局限, 难以满足对人类多模态、精细触觉的高效再现与舒适可穿戴的双重需求. 为克服上述瓶颈, 力学超材料凭借其结构超精巧、力学性能可编程以及多功能易集成等特点, 在触觉反馈系统中展现出巨大研究潜力. 本文系统梳理了当前力学超材料的主流功能特性, 分析了可编程泊松比、多稳态跳变、可编程刚度和输出模式转换等特性在触觉交互系统中的应用潜力, 并进一步结合VR/XR娱乐、医疗康复、残障辅助与人机协同等典型触觉反馈应用场景, 从系统层面探讨了力学超材料赋能触觉反馈交互的实施路径. 最后, 本文总结了当前力学超材料在触觉反馈任务中所面临的关键挑战, 并展望其未来在结构智能设计与制造以及多学科融合发展下的应用前景.Abstract: Touch, as one of the five primary human senses, carries crucial information related to environmental interaction, spatial perception and physical perception. In recent years, with the rapid advancement of human–machine interaction, how to efficiently and realistically reproduce haptic information has become a central challenge in building immersive interaction systems. However, traditional haptic devices are often limited by single functionality, complex structure, bulky size and weak integration, making it difficult to simultaneously achieve multimodal haptic reproduction and wearability. To overcome these bottlenecks, mechanical metamaterials, with their ultra-compact architectures, programmable mechanical properties and multifunctional integration capabilities, have demonstrated remarkable potential in haptic devices. This paper systematically reviews the mainstream functionalities of mechanical metamaterials and the practical integrability with corresponding haptic modalities, highlighting their potentials in haptic systems through programmable Poisson’s ratios, snap-through stabilities, various stiffness, and mode switching. Furthermore, typical haptic feedback application scenarios (VR/XR entertainment, medical rehabilitation, disability assistance and human–machine collaboration) are discussed from a system-level perspective in terms of enabling pathways and integration strategies. Finally, the challenges faced by mechanical metamaterials in haptic feedback are summarized, and future prospects are envisioned in the context of intelligent structural design, micro/nanoscale manufacturing and interdisciplinary convergence.
-
Key words:
- mechanical metamaterial /
- haptic feedback /
- actuators /
- deformation mechanisms
-
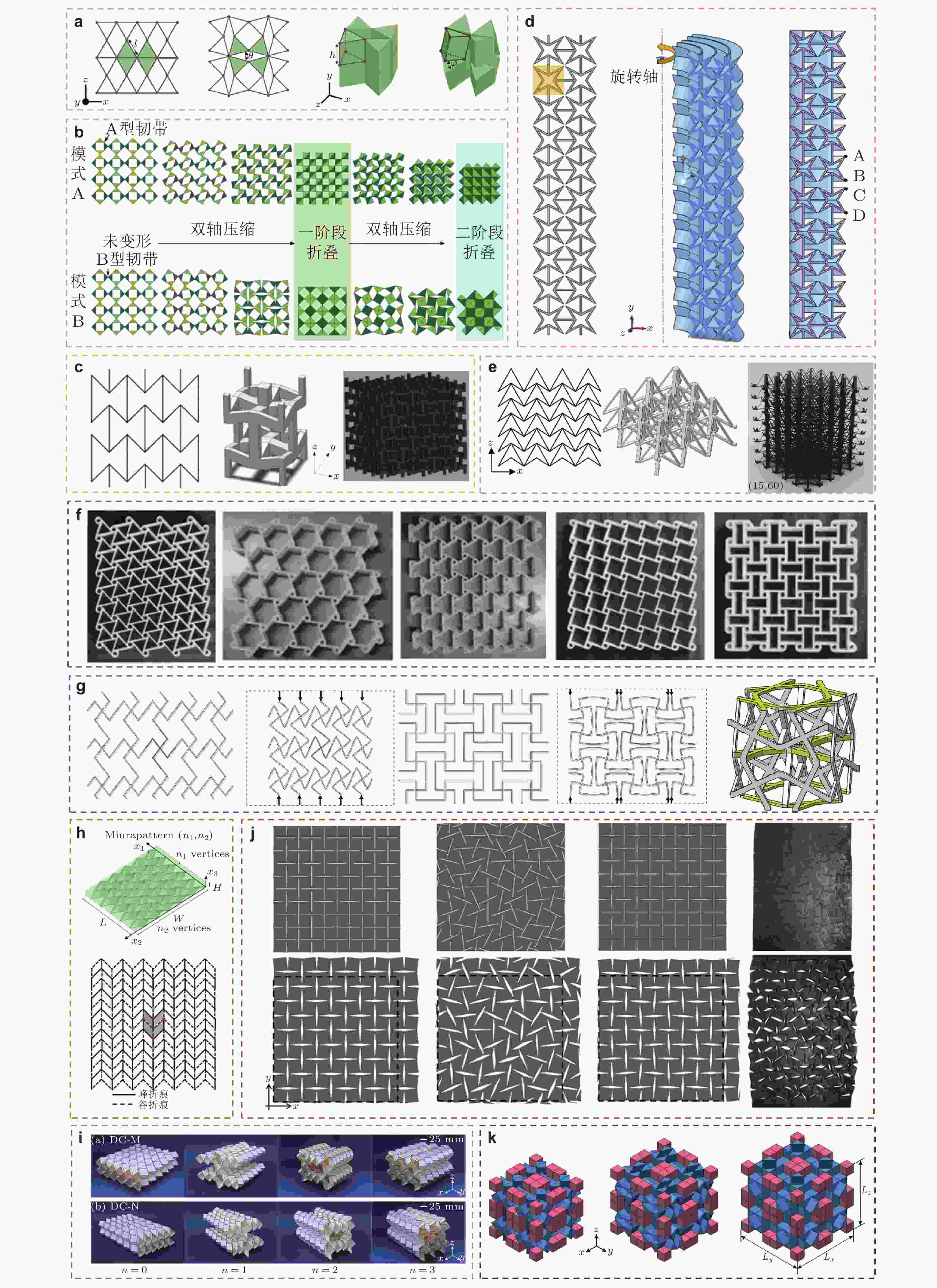
图 2 负泊松比超材料. (a) 基于旋转多边形的负泊松比超材料 (Sorrentino & Castagnetti 2023), (b) 基于旋转多边形的双峰分层超材料 (Hyatt & Harne 2022), (c) 二维内凹六边形蜂窝结构 (Yang et al. 2015), (d) 二维内凹星形结构 (Song et al. 2025), (e) 二维内凹四边形结构 (Wang et al. 2018), (f) 各类手性蜂窝结构 (Alderson et al. 2010), (g) 交叉手性结构 (Farrugia et al. 2019, Lu et al. 2017, Smith et al. 2000), (h) Miura折纸结构 (Lv et al. 2014), (i) 基于山谷线排布的折纸结构 (Li et al. 2024), (j) 具有狭缝阵列的剪纸结构 (Grima et al. 2016), (k) 基于Sarrus连杆运动学的负泊松比结构 (Yang et al. 2023)
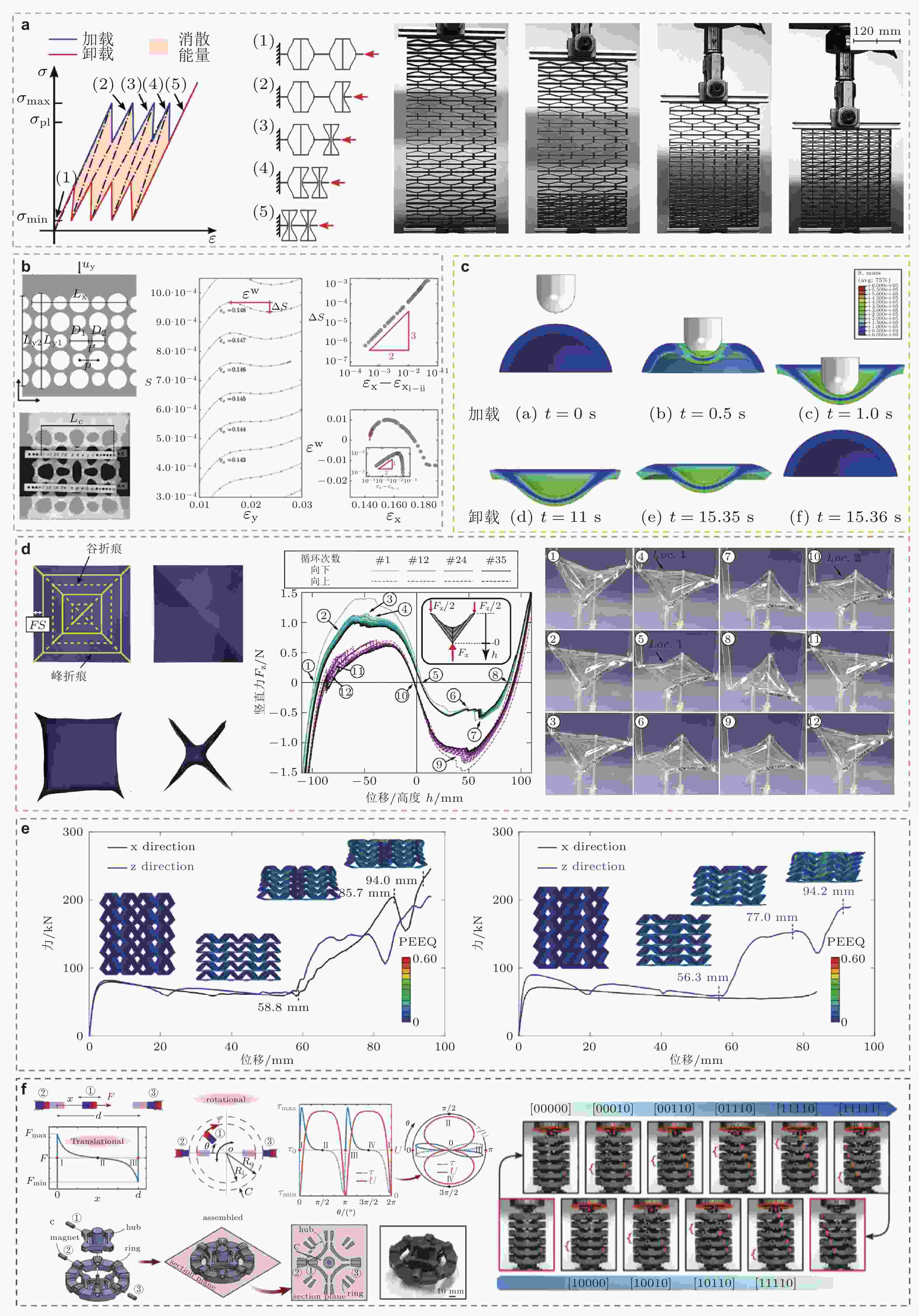
图 3 负刚度超材料. (a) 二维弯曲梁负刚度结构 (Restrepo et al. 2015), (b) 二维多孔板负刚度结构 (Florijn et al. 2016), (c) 具有负刚度特性的壳结构 (Brinkmeyer et al. 2012), (d) 双曲抛物面折纸 (Filipov & Redoutey 2018), (e) 正负刚度可调的折纸结构 (Li et al. 2025), (f) 基于永磁体的负扭转刚度超材料 (Seyedkanani & Akbarzadeh 2022)
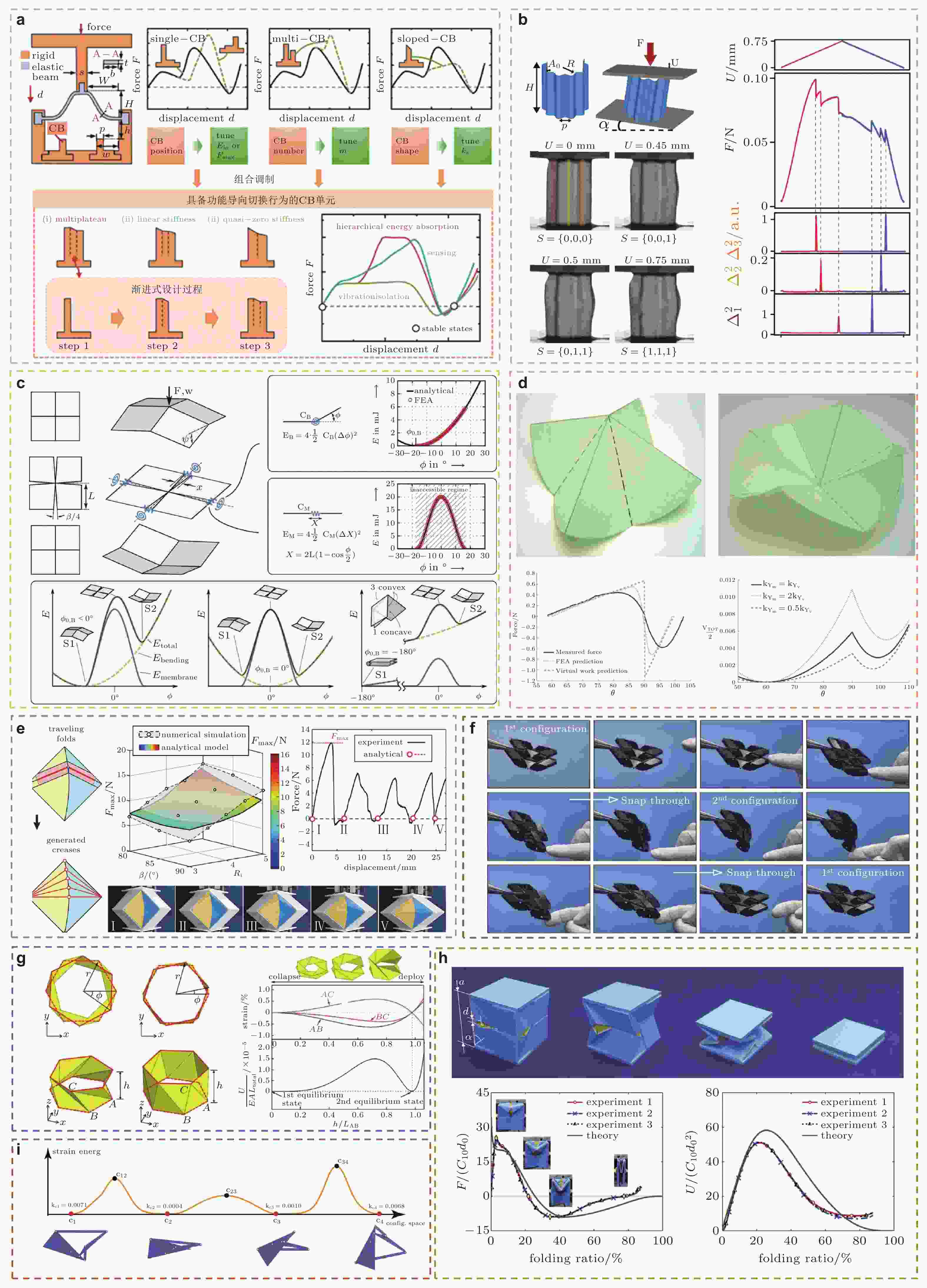
图 4 稳态跳变超材料. (a) 曲梁多稳态结构 (He et al. 2024), (b) 多稳态瓦楞片 (Bense & van Hecke 2021), (c) Miura双稳态折纸 (Faber et al. 2018), (d) Waterbomb双稳态折纸 (Hanna et al. 2014), (e) 可编程多稳态折纸结构 (Chai et al. 2024), (f) 可重构多稳态折纸结构 (Wang et al. 2024a), (g) Kresling双稳态折纸 (Zhai et al. 2018), (h) 双稳态剪纸结构 (Zhang et al. 2024), (i) 多稳态张拉桁架结构 (Ai et al. 2024)
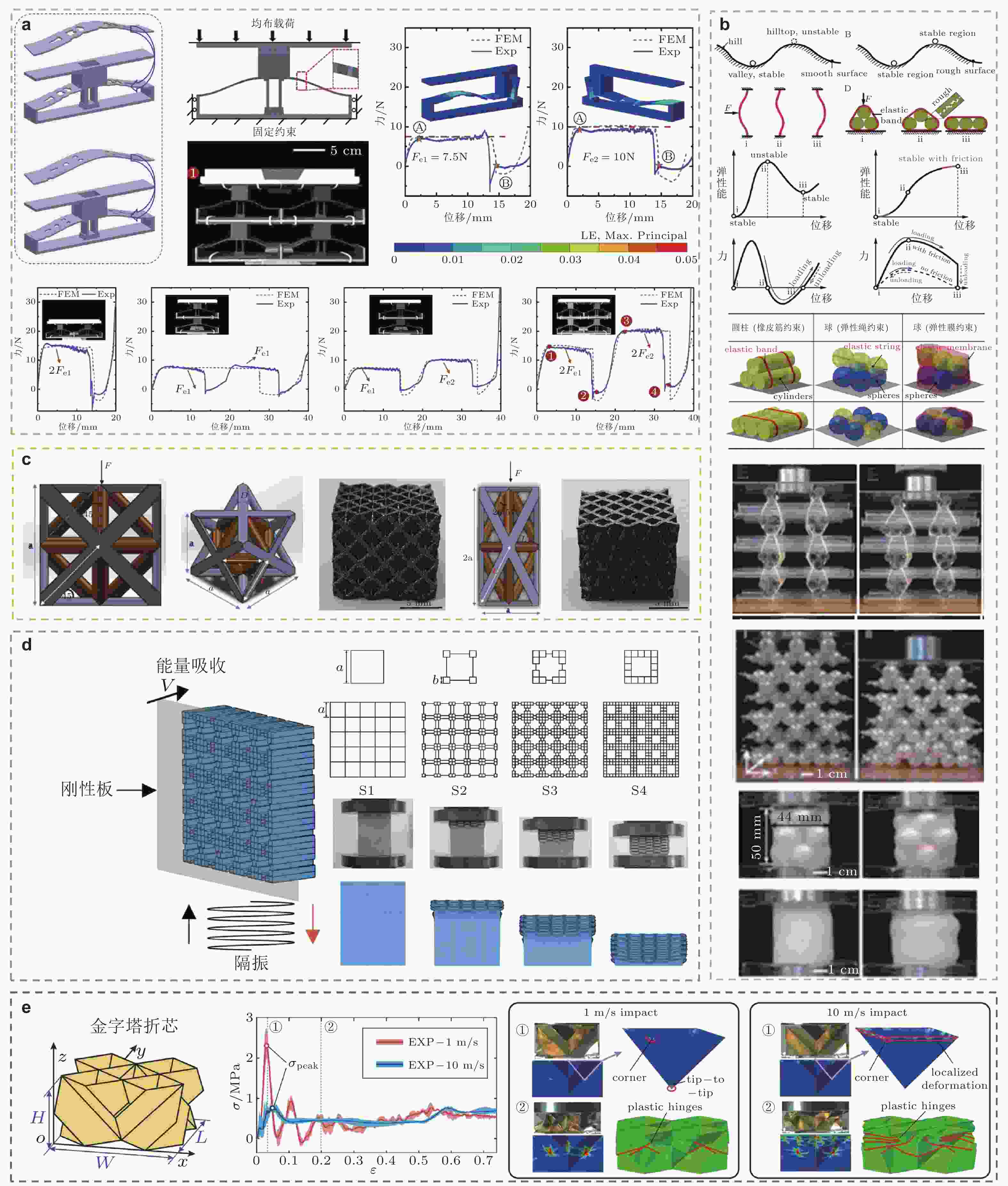
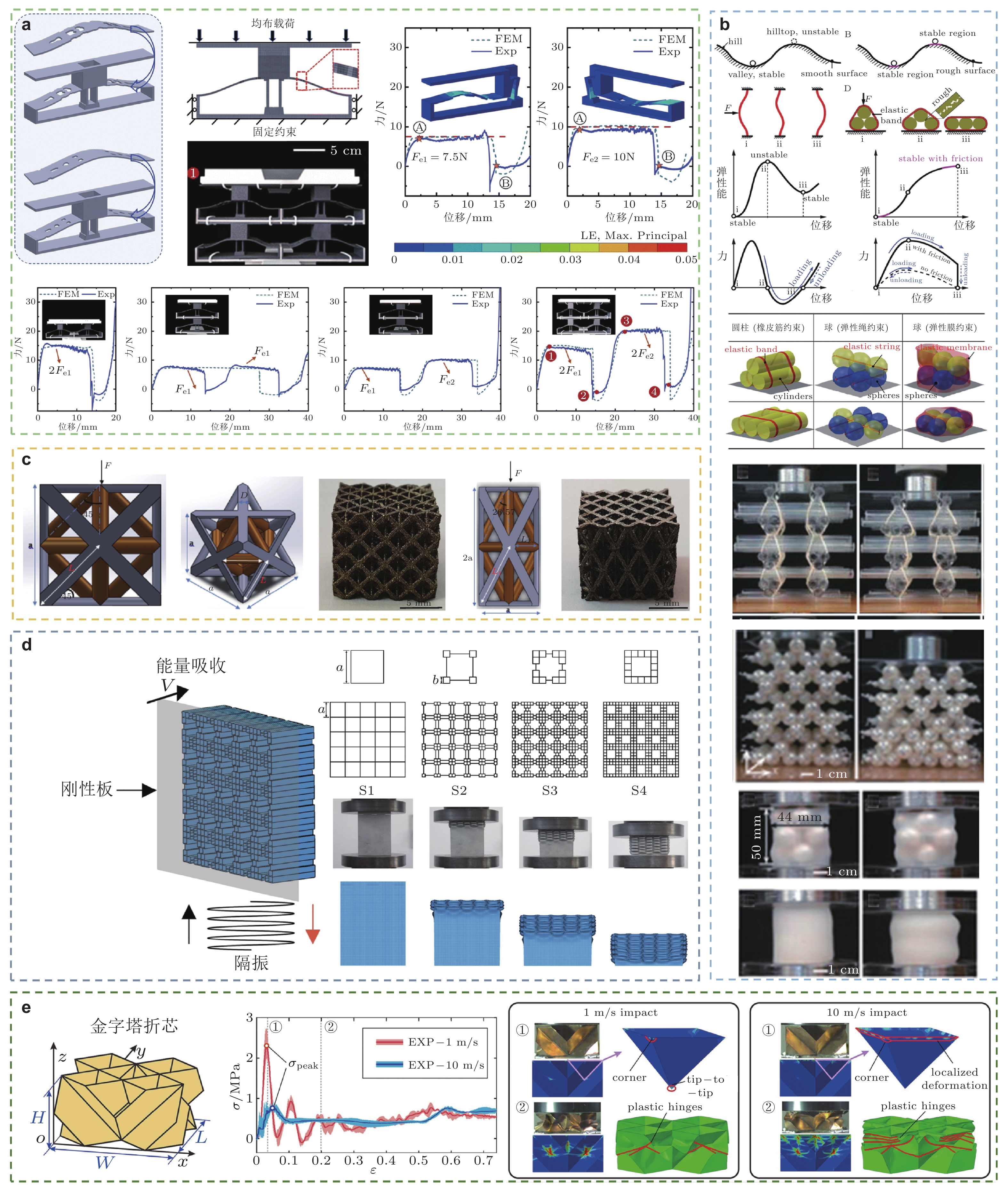
图 5 能量吸收超材料. (a) 结合曲梁和卡扣的能量吸收超材料 (Liang et al. 2025), (b) 韧带和薄膜约束的能量吸收超材料 (Fu et al. 2019), (c) 桁架晶格超材料 (Osman et al. 2020), (d) 基于自相似方格的分层超材料 (Zhang et al. 2022a), (e) 金字塔剪纸夹层结构 (Chen et al. 2024a)
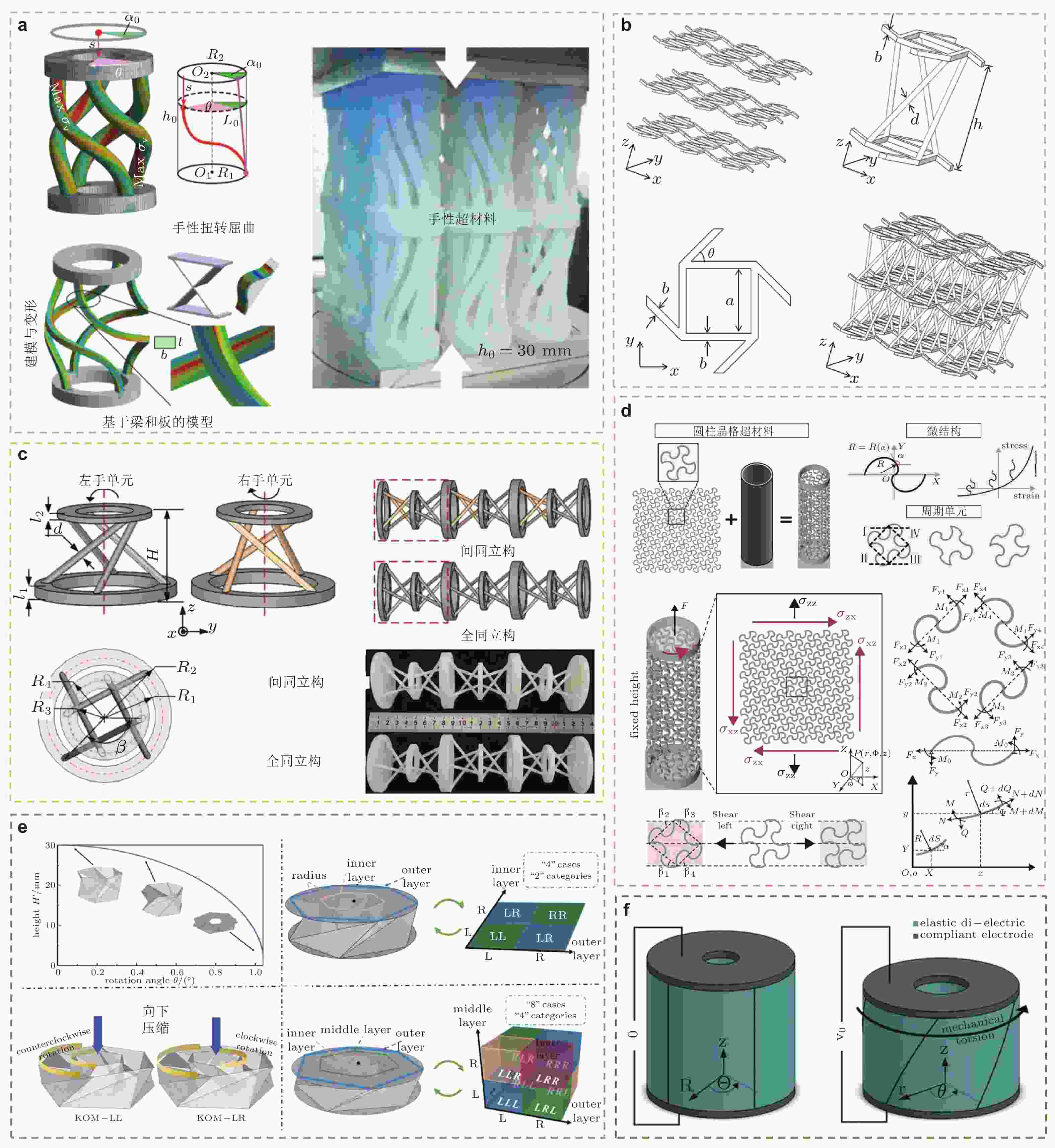
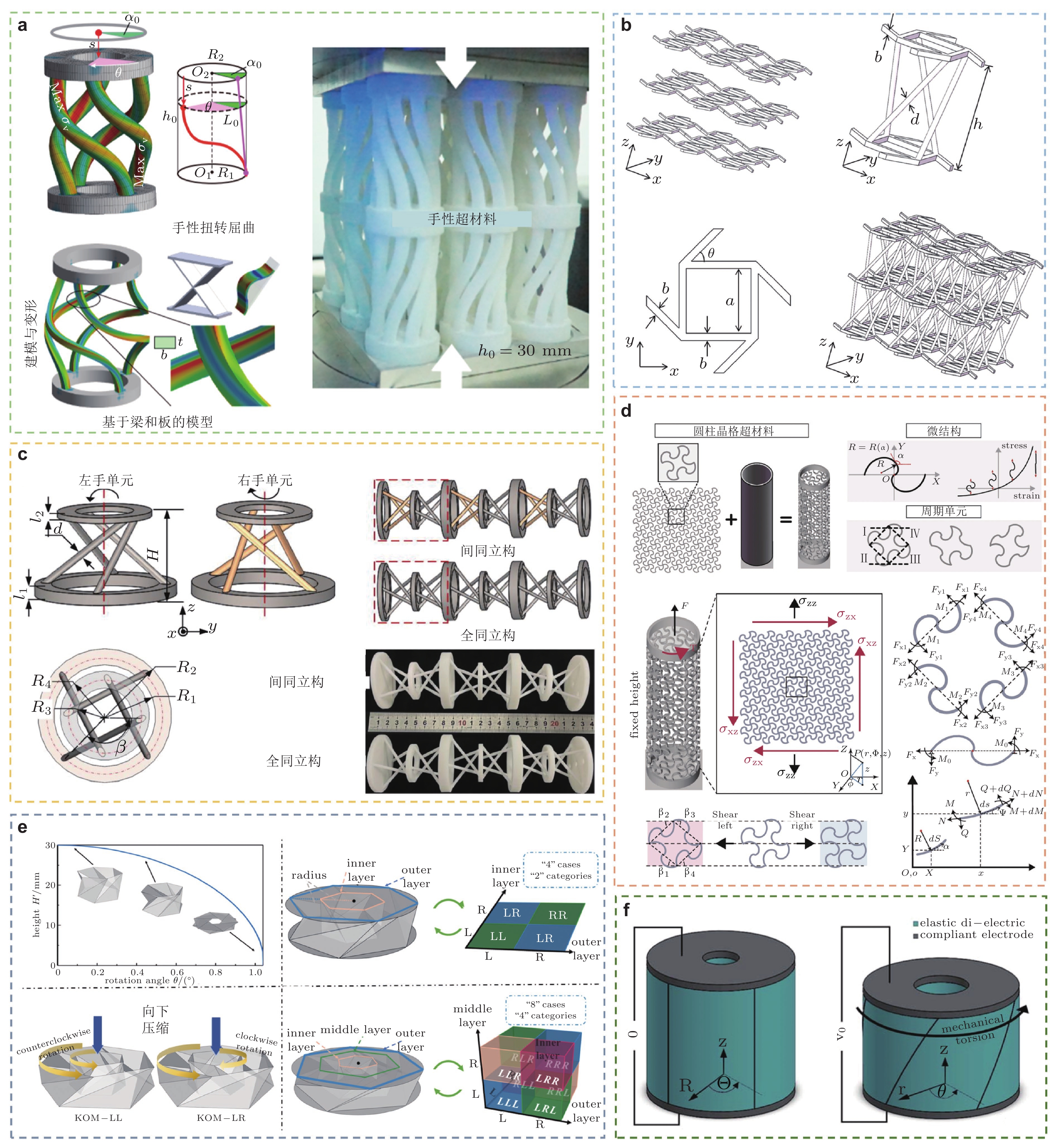
图 6 反常变形机制超材料. (a) 手性超材料压扭耦合现象 (Fang et al. 2025), (b) 基于杆件连接形式的手性超材料 (Zheng et al. 2019), (c) 圆形基底手性超材料 (Ou et al. 2024), (d) 基于反对称曲梁的圆柱晶格超材料 (Dong et al. 2024), (e) 多层Kresling折纸结构 (Teng et al. 2025), (f) 基于介电弹性体的管状执行器 (Askari-Sedeh & Baghani 2024)
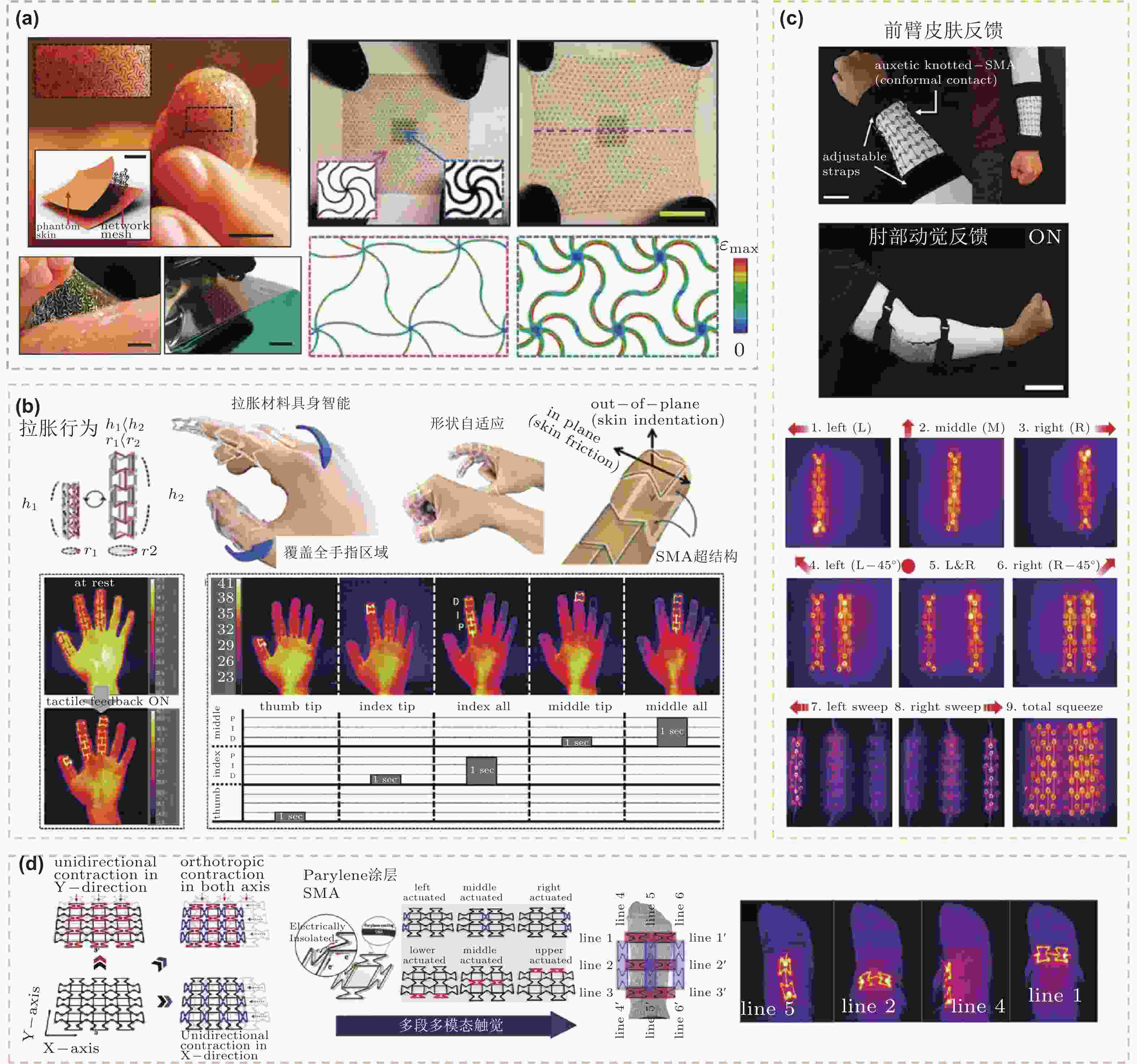
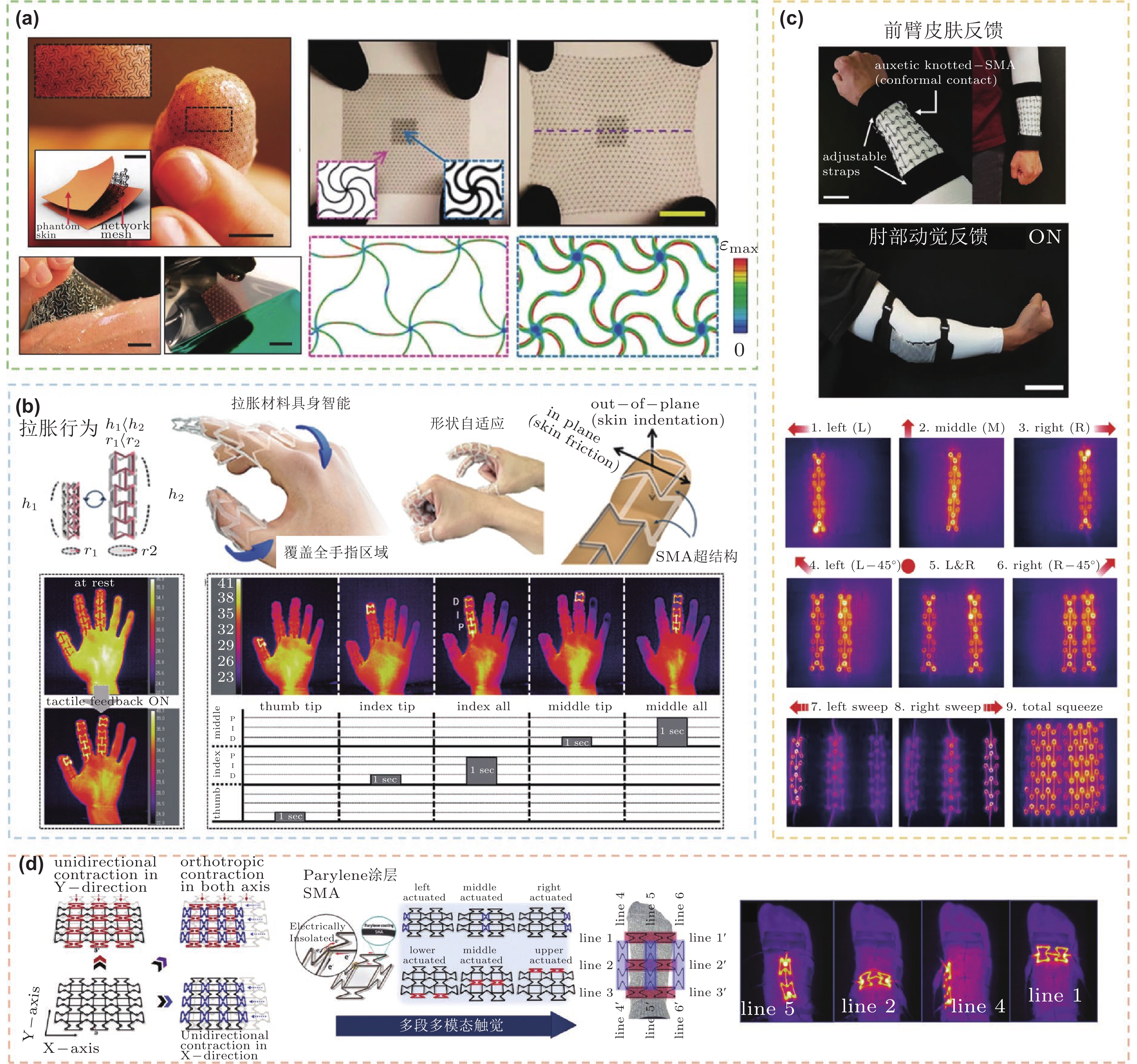
图 7 基于负泊松比超材料的触觉设备. (a) 实现皮肤共形的手性马蹄形阵列 (Jang et al. 2015)(标尺均为1 cm), (b) 基于形状记忆合金的指部触觉设备 (Oh et al. 2025), (c) 基于形状记忆合金的多模态可穿戴触觉设备 (Oh et al. 2023), 标尺分别为40 mm和80 mm, (d) 变形正交可控的可穿戴触觉设备 (Khan et al. 2025)

图 8 基于可编程刚度超材料的触觉设备. (a) 基于曲面折纸超材料的无线触觉设备 (Zhang et al. 2023c)(标尺分别为10 mm和50 mm), (b) 纤维驱动的可变刚度触觉手套 (Jadhav et al. 2021), (c) 具备正负刚度的亚稳态曲梁超材料 (Chibar et al. 2025), (d) 具备可调触觉特性的力学超材料 (Feick et al. 2023)
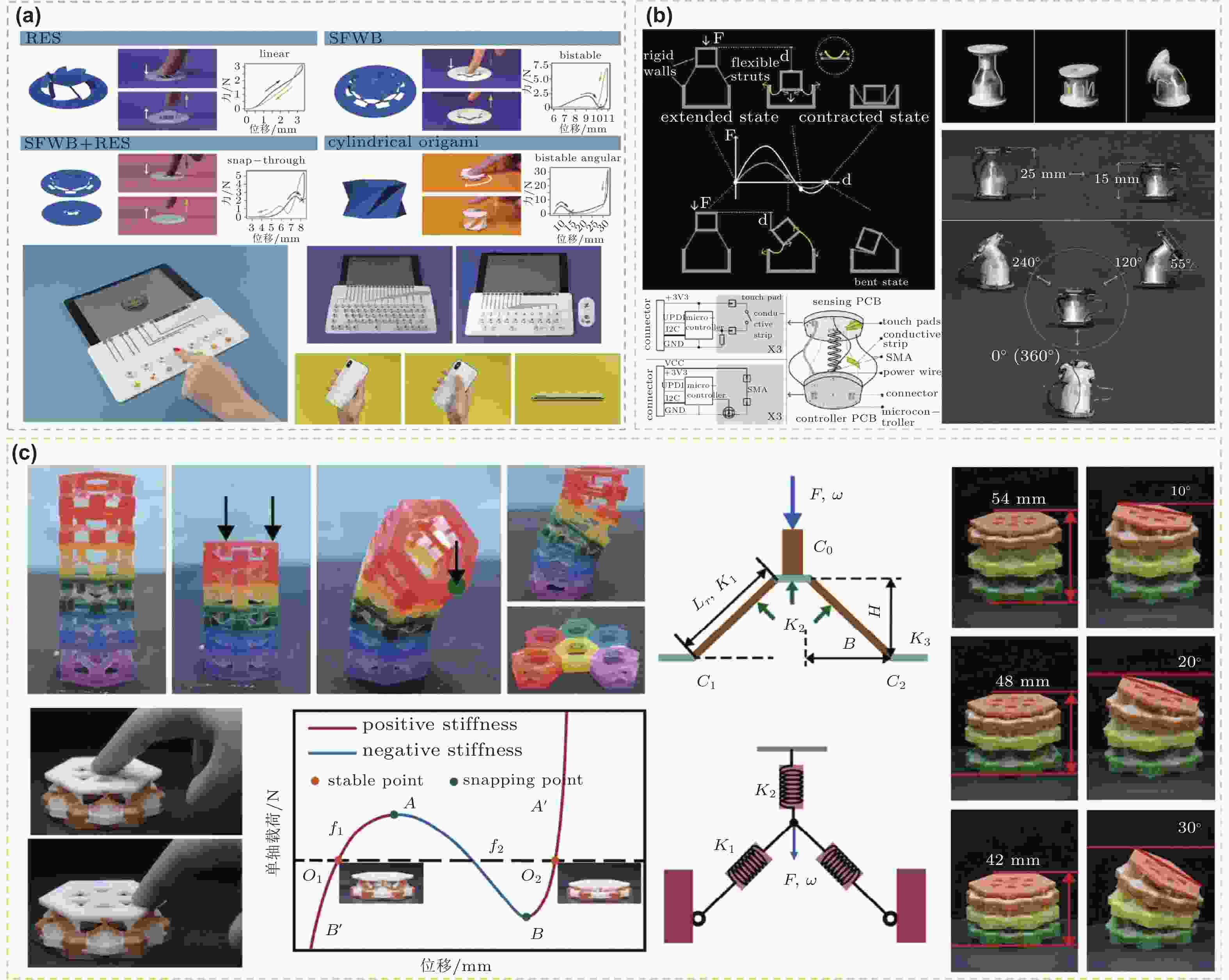
图 9 基于多稳态跳变超材料的触觉设备. (a) 基于折/剪纸的触觉单元 (Chang et al. 2020), (b) 形状记忆合金驱动的锥形执行器 (Lin et al. 2024), (c) 用于人机交互中机械触觉接口的多稳态软致动器 (Long et al. 2024)
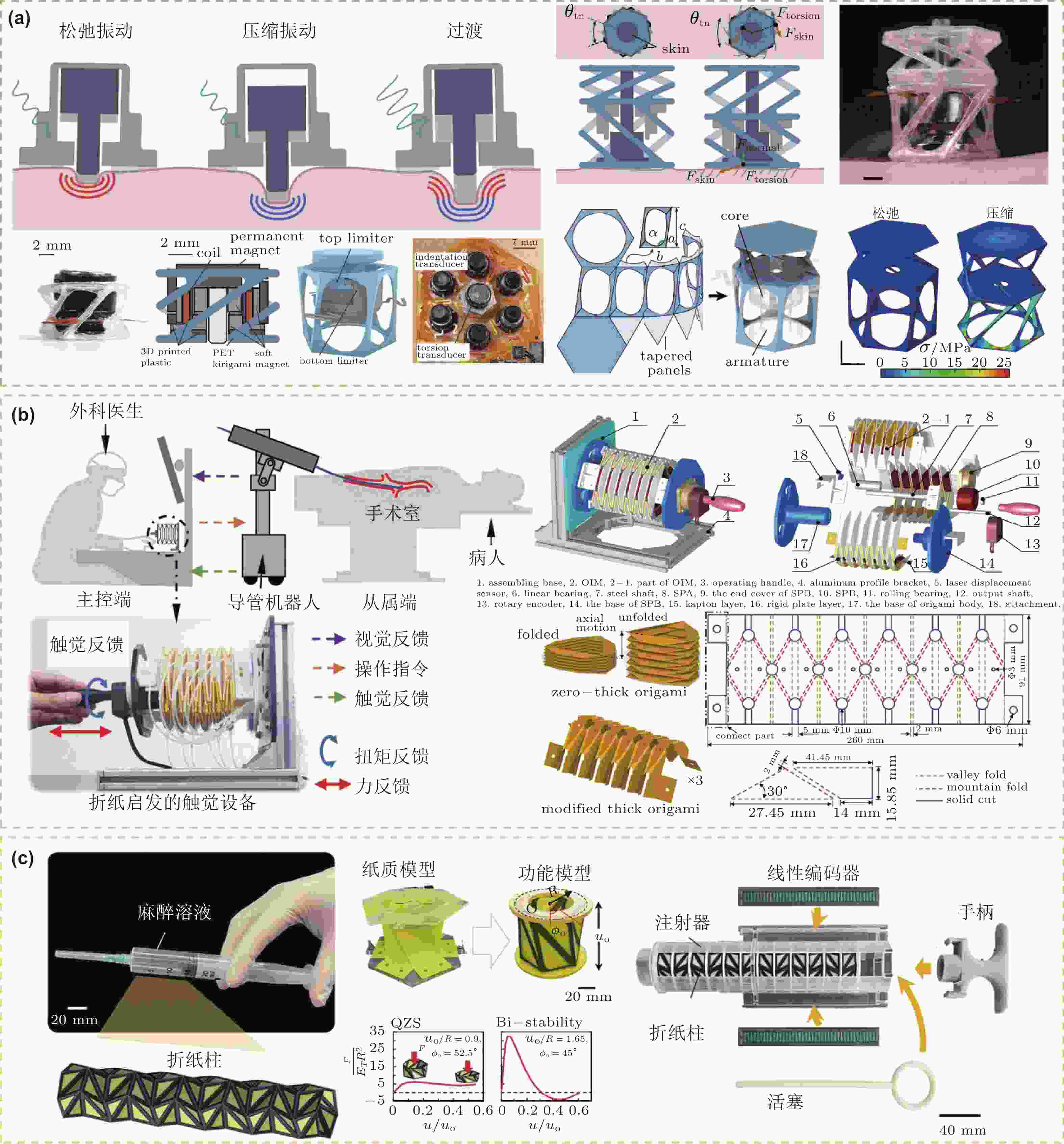
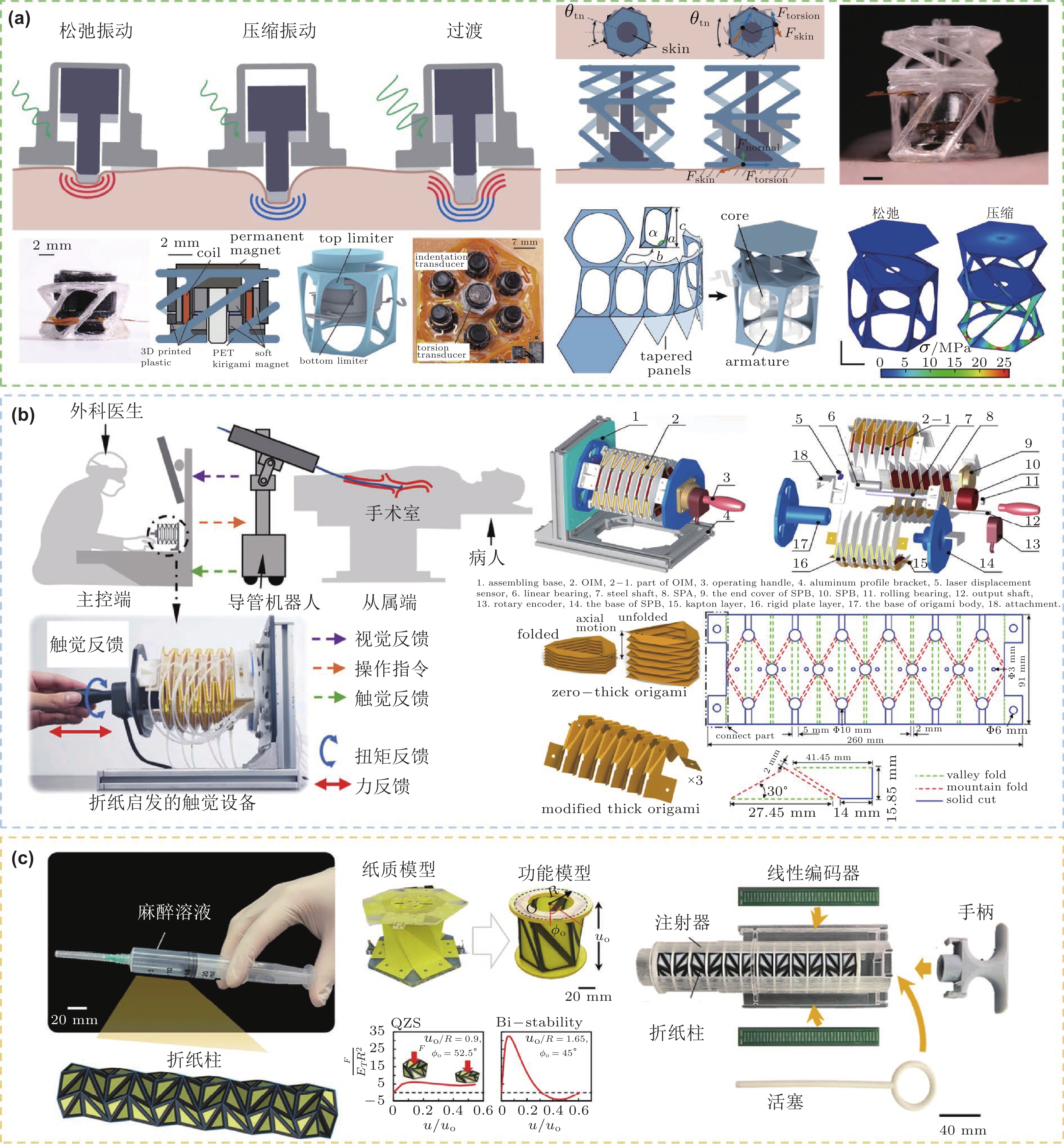
图 10 输出模式转换超材料触觉设备. (a) 基于生物弹性恢复的触觉反馈单元 (Flavin et al. 2024)(标尺为2 mm), (b) 基于折纸模块的手术触觉反馈装置 (Yin et al. 2024), (c) 用于牙医训练的Kresling折纸触觉设备 (Iiyoshi et al. 2024)

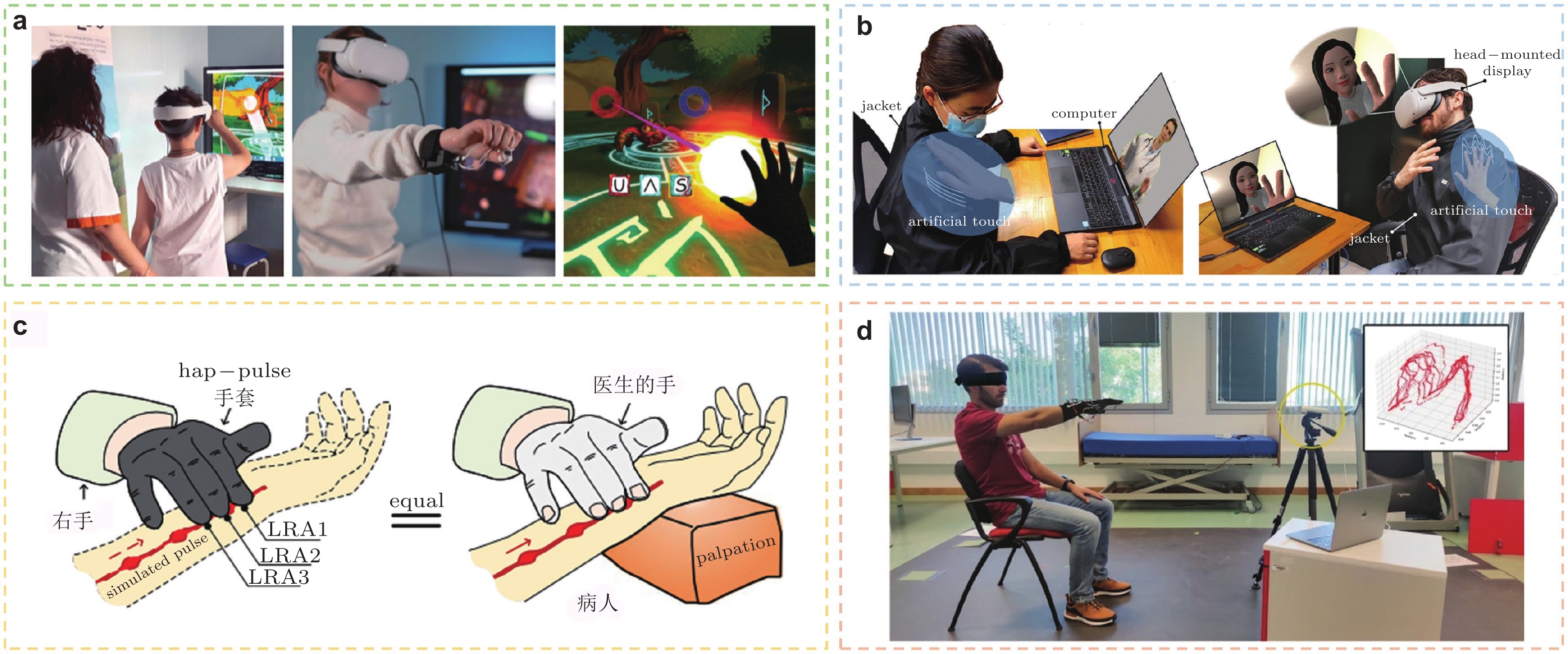
图 11 触觉反馈设备在VR/XR娱乐中的应用. (a) 实现沉浸式娱乐体验的触觉手套和腕带 (Huang et al. 2023), (b) 模拟天气和滚动触觉的人造肌肉 (Guo et al. 2024), (c) 提供击打体验的电磁驱动触觉设备 (Yu et al. 2019), (d) 提供击打体验的液压驱动触觉设备 (Chen et al. 2024c), (e) 提供抓握反馈的触觉手套 (Oh et al. 2025), (f) 结合气动和振动触觉反馈的静动态感知 (Liu et al. 2024), (g) 提供可变刚度力反馈和指尖振动的HaptGlove (Qi et al. 2023), (h) 与动物进行虚拟交互 (Wang et al. 2024c)
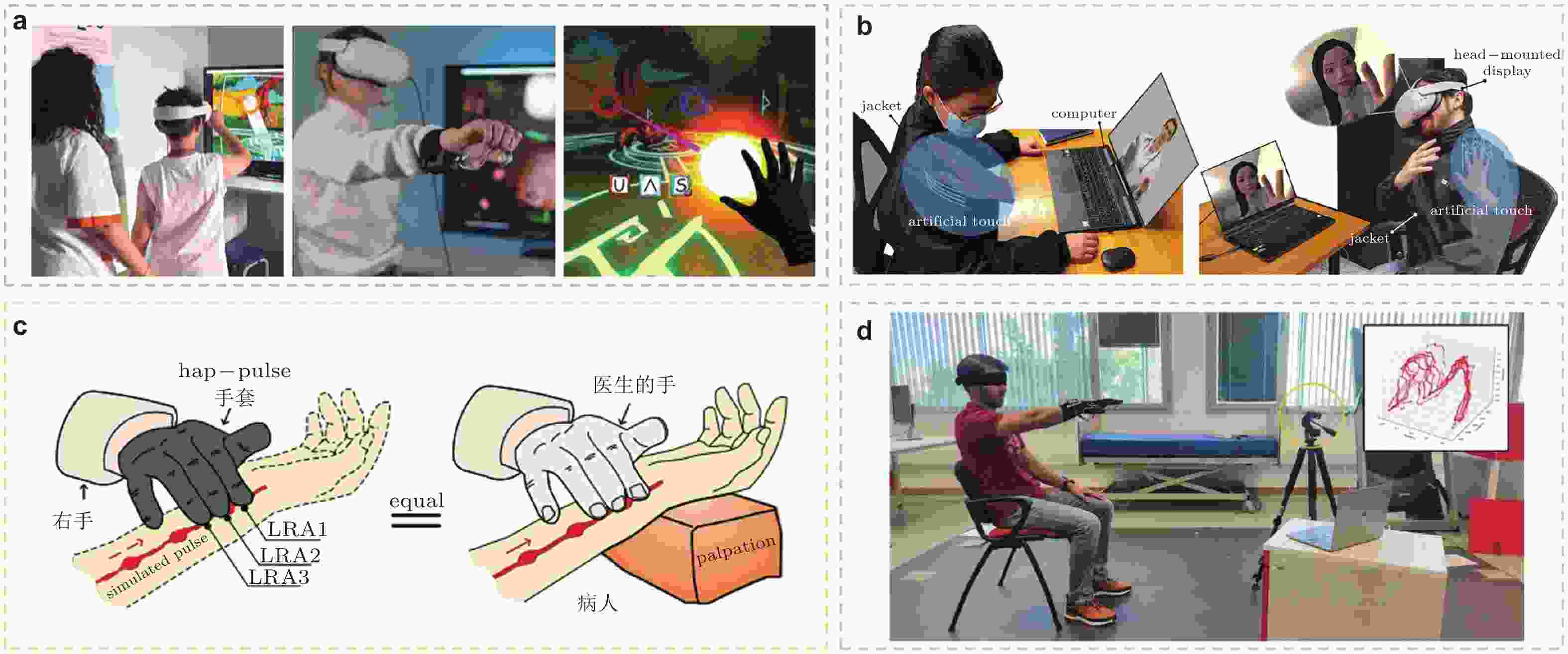
图 12 触觉反馈设备在医疗康复中的应用. (a) 脑瘫儿童的康复训练 (Koilias et al. 2020), (b) 远程问诊系统 (Talhan et al. 2024), (c) 用于医疗脉搏渲染的振动手套 (Luo et al. 2022), (d) 上肢康复训练 (Albusac et al. 2024)
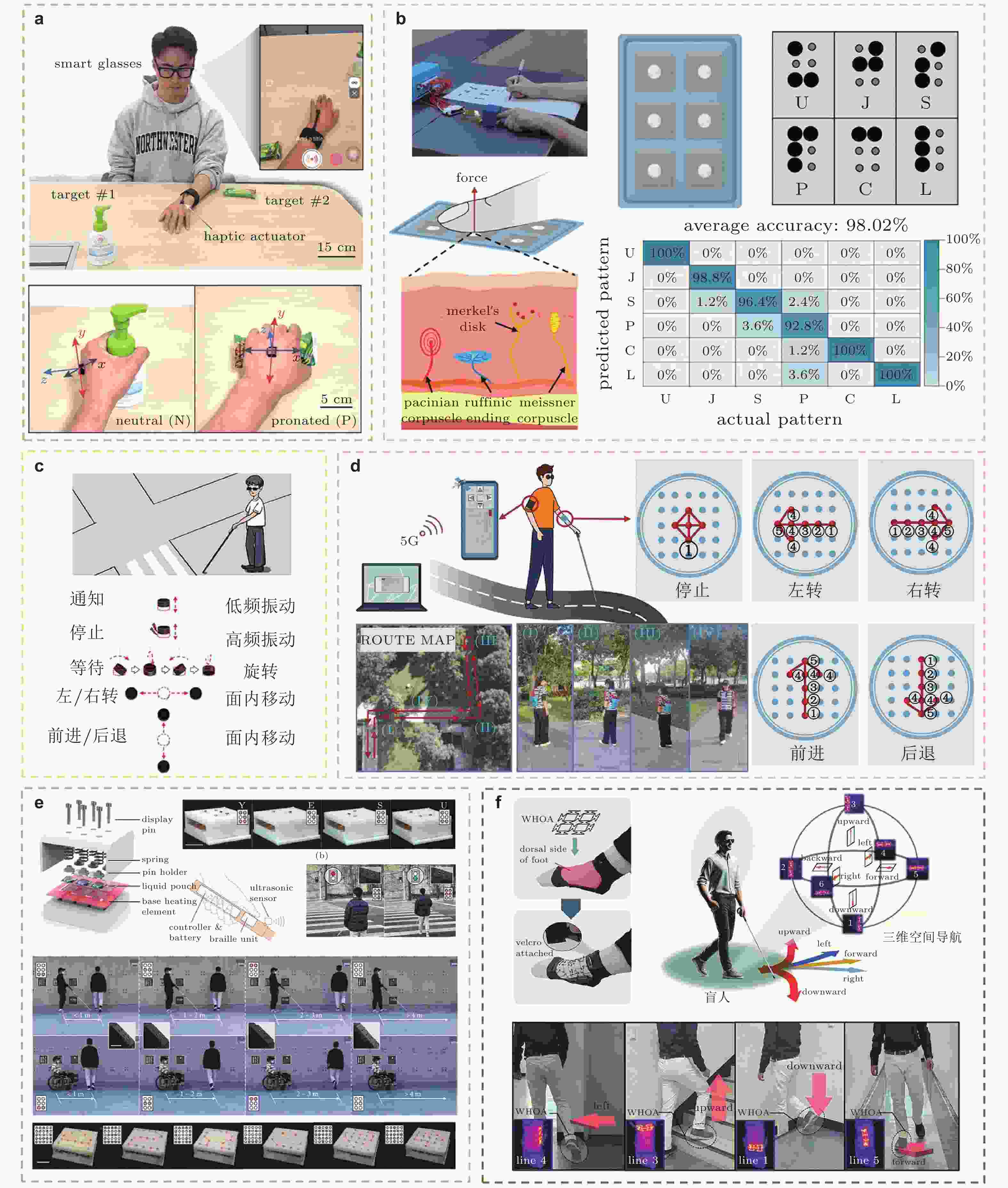
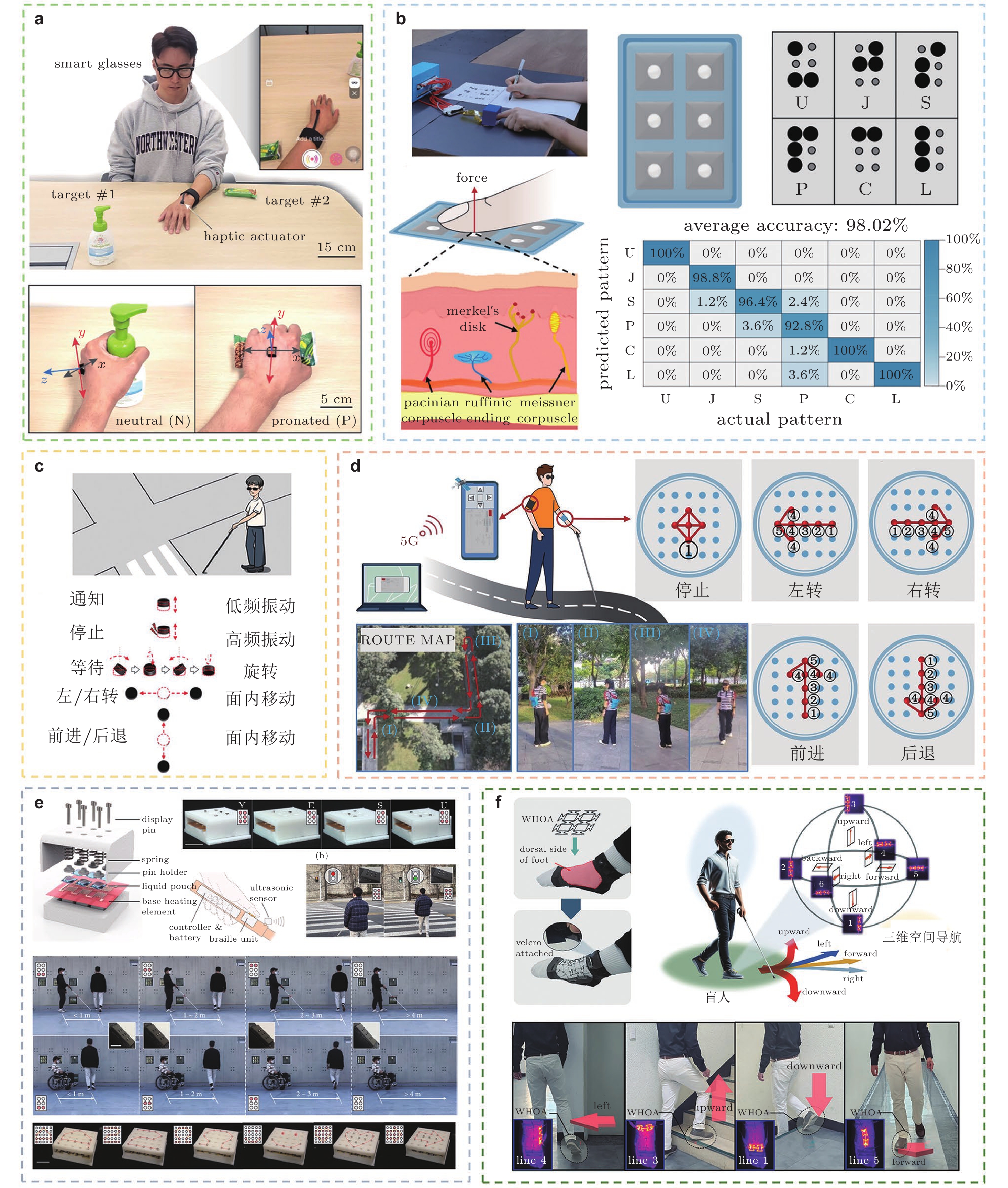
图 13 触觉反馈设备在残障人士辅助中的应用. (a) 手部导航系统 (Ha et al. 2025), (b)盲文练习辅助触觉装置 (Chen et al. 2024c), (c) 电磁驱动导航手杖 (Chen et al. 2024b), (d) 用于导航辅助的阵列式气动设备 (Chen et al. 2024c), (e) 液压驱动导航手杖 (Wang et al. 2022)(标尺为10 mm), (f) 足部导航设备 (Khan et al. 2025)
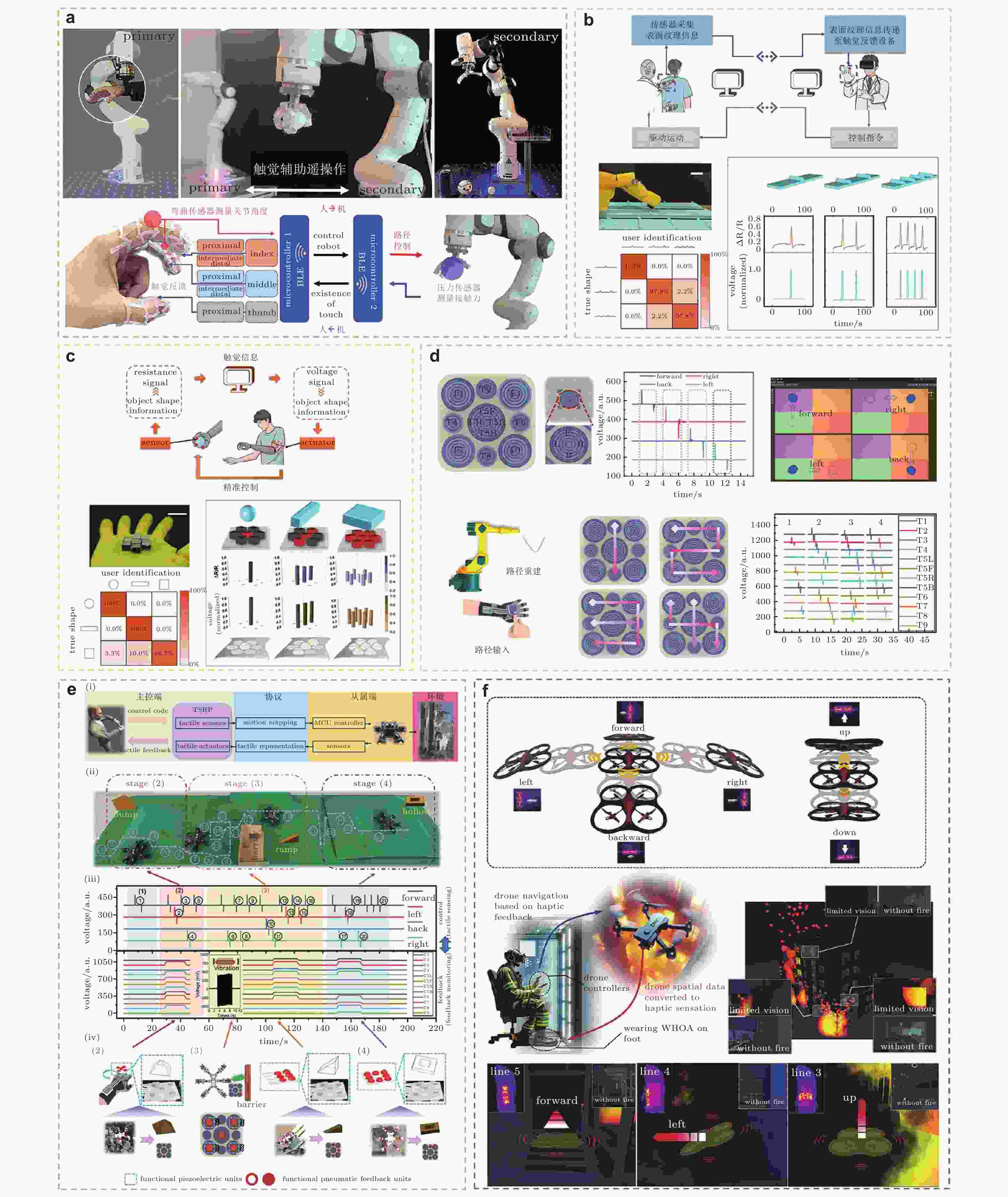
图 14 触觉反馈设备在人机协同中的应用. (a) 主从式机械臂协同作业 (Oh et al. 2025), (b) ~ (c) 纹理信息和物体形状特征在用户端和机器端的双向交互 (Chen et al. 2023), (d) 人机运动轨迹信息传输 (Liu et al. 2024), (e) 六足机器人遥操作期间的触觉反馈 (Liu et al. 2024)(标尺为10 mm), (f) 无人机搜救行动中的触觉反馈 (Khan et al. 2025)
-
[1] 姜丽云, 刘峰. 2024. 工程领域负刚度超材料的研究进展. 机械工程材料, 48: 1-9 (Jiang Y F, Liu F. 2024. Research progress on negative stiffness metamaterial in engineering field. Materials for Mechanical Engineering, 48: 1-9). doi: 10.11973/jxgccl240247Jiang Y F, Liu F. 2024. Research progress on negative stiffness metamaterial in engineering field. Materials for Mechanical Engineering, 48: 1-9. doi: 10.11973/jxgccl240247 [2] 项智慧, 季宏丽, 郝林, 等. 2017. 基于形状记忆合金的结构刚度控制研究. 振动, 37: 957-962+1065-1066 (Xiang Z H, Ji H L, Hao L, et al. 2017. Research on stiffness control of structure based on shape memory alloys. Journal of Vibration, Measurement & Diagnosis, 37: 957-962+1065-1066).Xiang Z H, Ji H L, Hao L, et al. 2017. Research on stiffness control of structure based on shape memory alloys. Journal of Vibration, Measurement & Diagnosis, 37: 957-962+1065-1066 [3] 闫继宏, 石培沛, 张新彬, 等. 2018. 软体机械臂仿生机理、驱动及建模控制研究发展综述. 机械工程学报, 54: 1-14 (Yan J H, Shi P P, Zhang X B, et al. 2018. Review of biomimetic mechanism, actuation, modeling and control in soft manipulators. Journal of Mechanical Engineering, 54: 1-14).Yan J H, Shi P P, Zhang X B, et al. 2018. Review of biomimetic mechanism, actuation, modeling and control in soft manipulators. Journal of Mechanical Engineering, 54: 1-14. [4] 杨航. 2023. 可编程机械超材料的结构设计及力学行为研究. [博士论文]. 哈尔滨: 哈尔滨工业大学 (Hang Y. 2023. Structure design and mechanical behavior of programmable mechanical metamaterials. [PhD Thesis]. Harbin: Harbin Institute of Technology).Hang Y. 2023. Structure design and mechanical behavior of programmable mechanical metamaterials. [PhD Thesis]. Harbin: Harbin Institute of Technology. [5] 张彦刚. 2024. 超弹性材料圆管截面几何对Poynting效应的影响研究. [硕士论文]. 西安: 西安理工大学 (Zhang Y G. 2024. Study on the influence of circular tube cross-section geometry on the poynting effect in hyper-elastic materials. [Master Thesis]. Xi’an: Xi’an University of technology).Zhang Y G. 2024. Study on the influence of circular tube cross-section geometry on the poynting effect in hyper-elastic materials. [Master Thesis]. Xi’an: Xi’an University of technology. [6] Abd M A, Ingicco J, Hutchinson D T, et al. 2022. Multichannel haptic feedback unlocks prosthetic hand dexterity. Scientific Reports, 12: 2323. doi: 10.1038/s41598-022-04953-1 [7] Abdol-Hamid O C, Wang Y, Farzinazar S, et al. 2023. Tunable thermal transport in 4D printed mechanical metamaterials. Materials & Design, 231: 111992. doi: 10.1016/j.matdes.2023.111992 [8] Ackerley R, Hassan E, Curran A, et al. 2012. An fMRI study on cortical responses during active self-touch and passive touch from others. Frontiers in Behavioral Neuroscience, 6. [9] Ai L, Gao X L. 2017. Metamaterials with negative Poisson’s ratio and non-positive thermal expansion. Composite Structures, 162: 70-84. doi: 10.1016/j.compstruct.2016.11.056 [10] Ai L, Yin S K, He W X, et al. 2024. Easy-to-actuate multi-compatible truss structures with prescribed reconfiguration. Nature Communications, 15: 4886. doi: 10.1038/s41467-024-49210-3 [11] Albusac J, Herrera V, Schez-Sobrino S, et al. 2024. Innovative haptic-based system for upper limb rehabilitation in visually impaired individuals: A multilayer approach. Multimedia Tools and Applications, 83: 60537-60563. doi: 10.1007/s11042-023-17892-4 [12] Alderson A, Alderson K L, Attard D, et al. 2010. Elastic constants of 3-, 4- and 6-connected chiral and anti-chiral honeycombs subject to uniaxial in-plane loading. Composites Science and Technology, 70: 1042-1048. doi: 10.1016/j.compscitech.2009.07.009 [13] Amend J R, Brown E, Rodenberg N, et al. 2012. A positive pressure universal gripper based on the jamming of granular material. IEEE Transactions on Robotics, 28: 341-350. doi: 10.1109/TRO.2011.2171093 [14] Ansari Y, Manti M, Falotico E, et al. 2017. Towards the development of a soft manipulator as an assistive robot for personal care of elderly people. International Journal of Advanced Robotic Systems, 14: 172988141668713. [15] Askari-Sedeh M, Baghani M. 2024. Semi-analytical modeling of electro-strictive behavior in dielectric elastomer tube actuators. Physica Scripta, 99: 055503. doi: 10.1088/1402-4896/ad350f [16] Bensaude-Vincent B. 2001. The construction of a discipline: Materials science in the United States. Historical Studies in the Physical and Biological Sciences, 31: 223-248. doi: 10.1525/hsps.2001.31.2.223 [17] Bense H, van Hecke M. 2021. Complex pathways and memory in compressed corrugated sheets. Proceedings of the National Academy of Sciences, 118: e2111436118. doi: 10.1073/pnas.2111436118 [18] Bergholz M, Ferle M, Weber B M. 2023. The benefits of haptic feedback in robot assisted surgery and their moderators: A meta-analysis. Scientific Reports, 13: 19215. doi: 10.1038/s41598-023-46641-8 [19] Borkowska V R, McConnell A, Vijayakumar S, et al. 2022. A haptic sleeve as a method of mechanotactile feedback restoration for myoelectric hand prosthesis users. Frontiers in Rehabilitation Sciences, 3. [20] Brinkmeyer A, Santer M, Pirrera A, et al. 2012. Pseudo-bistable self-actuated domes for morphing applications. International Journal of Solids and Structures, 49: 1077-1087. doi: 10.1016/j.ijsolstr.2012.01.007 [21] Bückmann T, Thiel M, Kadic M, et al. 2014. An elasto-mechanical unfeelability cloak made of pentamode metamaterials. Nature Communications, 5: 4130. doi: 10.1038/ncomms5130 [22] Carpenter C W, Tan S T M, Keef C, et al. 2019. Healable thermoplastic for kinesthetic feedback in wearable haptic devices. Sensors and Actuators A: Physical, 288: 79-85. doi: 10.1016/j.sna.2019.01.032 [23] Chai S B, Hu Z, Chen Y, et al. 2024. Programmable multi-stability of curved-crease origami structures with travelling folds. Journal of the Mechanics and Physics of Solids, 193: 105877. doi: 10.1016/j.jmps.2024.105877 [24] Chang Z K, Ta T D, Narumi K, et al. 2020. Kirigami haptic swatches: Design methods for cut-and-fold haptic feedback mechanisms. Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, 1-12. [25] Chen H H, Chai S B, Ma J Y. 2024a. Energy absorption of the kirigami-inspired pyramid foldcore sandwich structures under low-velocity impact. International Journal of Mechanical Sciences, 284: 109774. doi: 10.1016/j.ijmecsci.2024.109774 [26] Chen S, Chen Y J, Yang J, et al. 2023. Skin-integrated stretchable actuators toward skin-compatible haptic feedback and closed-loop human-machine interactions. npj Flexible Electronics, 7: 1. [27] Chen S, Yu L, Shen W J, et al. 2024b. Multimodal 5-DOF stretchable electromagnetic actuators toward haptic information delivery. Advanced Functional Materials, 34: 2314515. doi: 10.1002/adfm.202314515 [28] Chen Y, Wu H, Wang X X, et al. 2024c. Wireless programmable patterns of electro-hydraulic haptic electronic skins able to create surface morphology. Chemical Engineering Journal, 500: 156612. doi: 10.1016/j.cej.2024.156612 [29] Chen Z S, Guo B, Yang Y M, et al. 2014. Metamaterials-based enhanced energy harvesting: A review. Physica B: Condensed Matter, 438: 1-8. doi: 10.1016/j.physb.2013.12.040 [30] Cheng X, Zhang Y, Ren X, et al. 2022. Design and mechanical characteristics of auxetic metamaterial with tunable stiffness. International Journal of Mechanical Sciences, 223: 107286. doi: 10.1016/j.ijmecsci.2022.107286 [31] Chi Y D, Li Y B, Zhao Y, et al. 2022. Bistable and multistable actuators for soft robots: Structures, materials, and functionalities. Advanced Materials, 34: 2110384. doi: 10.1002/adma.202110384 [32] Chibar R, Kostyukova V, Khajikhanov S, et al. 2025. Honeycomb-inspired metamaterial for tactile sensors with variable stiffness. IEEE Sensors Journal, 25: 577-586. doi: 10.1109/jsen.2024.3492498 [33] Cianchetti M, Arienti A, Follador M, et al. 2011. Design concept and validation of a robotic arm inspired by the octopus. Materials Science and Engineering: C, 31: 1230-1239. doi: 10.1016/j.msec.2010.12.004 [34] Contreras N, Zhang X H, Hao H, et al. 2024. Application of elastic metamaterials/meta-structures in civil engineering: A review. Composite Structures, 327: 117663. doi: 10.1016/j.compstruct.2023.117663 [35] Cummer S A, Christensen J, Alù A. 2016. Controlling sound with acoustic metamaterials. Nature Reviews Materials, 1: 16001. doi: 10.1038/natrevmats.2016.1 [36] Degani A, Choset H, Wolf A, et al. 2006. Percutaneous intrapericardial interventions using a highly articulated robotic probe. The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, BioRob 2006. [37] Delmas P, Hao J, Rodat-Despoix L. 2011. Molecular mechanisms of mechanotransduction in mammalian sensory neurons. Nature Reviews Neuroscience, 12: 139-153. doi: 10.1038/nrn2993 [38] Di C S V P, Macdonald S A, Wilson G, et al. 2025. The future of tactile haptics: Emerging technologies and novel applications. Handbook of Human Computer Interaction: 1-28. [39] Dong L, Zhou K, Wang D. 2024. Programmable nonreciprocal Poynting effect enabled by lattice metamaterials. Science Advances, 10: eadl5774. doi: 10.1126/sciadv.adl5774 [40] Driscoll B, Liu M, Huang H. 2023. 1-D manual tracing based on a high density haptic stimulation grid-a pilot effort. 2023 IEEE World Haptics Conference (WHC), 375-381. [41] Duncan O, Shepherd T, Moroney C, et al. 2018. Review of auxetic materials for sports applications: Expanding options in comfort and protection. Applied Sciences, 8(6). [42] Esin M, Pasternak E, Dyskin A V. 2016. Stability of chains of oscillators with negative stiffness normal, shear and rotational springs. International Journal of Engineering Science, 108: 16-33. doi: 10.1016/j.ijengsci.2016.08.002 [43] Evans K E. 1991. Auxetic polymers: A new range of materials. Endeavour, 15: 170-174. doi: 10.1016/0160-9327(91)90123-S [44] Evans K E, Alderson A. 2000. Auxetic materials: Functional materials and structures from lateral thinking! Advanced Materials, 12: 617-628. [45] Faber J A, Arrieta A F, Studart A R. 2018. Bioinspired spring origami. Science, 359: 1386-1391. doi: 10.1126/science.aap7753 [46] Fang X, Yu D L, Wen J H, et al. 2025. Large recoverable elastic energy in chiral metamaterials via twist buckling. Nature, 639: 639-645. doi: 10.1038/s41586-025-08658-z [47] Farrugia P-S, Gatt R, Zammit Lonardelli E, et al. 2019. Different deformation mechanisms leading to auxetic behavior exhibited by missing rib square grid structures. Physica Status Solidi (B), 256: 1800186. doi: 10.1002/pssb.201800186 [48] Fayyaz, Bashmal S, Nazir A, et al. 2025. Damping optimization and energy absorption of mechanical metamaterials for enhanced vibration control applications: A critical review. Polymers, 17: 237. doi: 10.3390/polym17020237 [49] Feick M, Degraen D, Hupperich F, et al. 2023. MetaReality: Enhancing tactile experiences using actuated 3D-printed metamaterials in virtual reality. Frontiers in Virtual Reality, 4. [50] Filipov E T, Redoutey M. 2018. Mechanical characteristics of the bistable origami hypar. Extreme Mechanics Letters, 25: 16-26. doi: 10.1016/j.eml.2018.10.001 [51] Flavin M T, Ha K-H, Guo Z R, et al. 2024. Bioelastic state recovery for haptic sensory substitution. Nature, 635: 345-352. doi: 10.1038/s41586-024-08155-9 [52] Florijn B, Coulais C, van Hecke M. 2016. Programmable mechanical metamaterials: The role of geometry. Soft Matter, 12: 8736-8743. doi: 10.1039/C6SM01271J [53] Frenzel T, Kadic M, Wegener M. 2017. Three-dimensional mechanical metamaterials with a twist. Science, 358: 1072-1074. doi: 10.1126/science.aao4640 [54] Frisoli A, Leonardis D. 2024. Wearable haptics for virtual reality and beyond. Nature Reviews Electrical Engineering, 1: 666-679. doi: 10.1038/s44287-024-00089-8 [55] Fu K J, Zhao Z H, Jin L H. 2019. Programmable granular metamaterials for reusable energy absorption. Advanced Functional Materials, 29: 1901258. doi: 10.1002/adfm.201901258 [56] Gao Y Y, Yao K M, Jia S X, et al. 2024. Advances in materials for haptic skin electronics. Matter, 7: 2826-2845. doi: 10.1016/j.matt.2024.06.010 [57] Giubilini A, Minetola P. 2023. Multimaterial 3D printing of auxetic jounce bumpers for automotive suspensions. Rapid Prototyping Journal, 29: 131-142. doi: 10.1108/RPJ-02-2023-0066 [58] Greaves G N, Greer A L, Lakes R S, et al. 2011. Poisson’s ratio and modern materials. Nature Materials, 10: 823-837. doi: 10.1038/nmat3134 [59] Grima J N, Mizzi L, Azzopardi K M, et al. 2016. Auxetic perforated mechanical metamaterials with randomly oriented cuts. Advanced Materials, 28: 385-389. doi: 10.1002/adma.201503653 [60] Grimberg R. 2013. Electromagnetic metamaterials. Materials Science and Engineering: B, 178: 1285-1295. doi: 10.1016/j.mseb.2013.03.022 [61] Gu Y Q, Wei Z B, Wei G W, et al. 2024. Kirigami-inspired three-dimensional metamaterials with programmable isotropic and orthotropic thermal expansion. Advanced Materials, 36: 2411232. [62] Guo X G, Ni X Y, Li J H, et al. 2021. Designing mechanical metamaterials with Kirigami-inspired, hierarchical constructions for giant positive and negative thermal expansion. Advanced Materials, 33: 2004919. doi: 10.1002/adma.202004919 [63] Guo Y X, Luo Y, Plamthottam R, et al. 2024. Haptic artificial muscle skin for extended reality. Science Advances, 10: eadr1765. doi: 10.1126/sciadv.adr1765 [64] Ha K-H, Yoo J, Li S P, et al. 2025. Full freedom-of-motion actuators as advanced haptic interfaces. Science, 387: 1383-1390. doi: 10.1126/science.adt2481 [65] Hanna B H, Lund J M, Lang R J, et al. 2014. Waterbomb base: A symmetric single-vertex bistable origami mechanism. Smart Materials and Structures, 23: 094009. doi: 10.1088/0964-1726/23/9/094009 [66] Hao Y F, Wang T M, Xie Z X, et al. 2018. A eutectic-alloy-infused soft actuator with sensing, tunable degrees of freedom, and stiffness properties. Journal of Micromechanics and Microengineering, 28: 024004. doi: 10.1088/1361-6439/aa9d0e [67] He J, Wang Y H, Shen Z Q, et al. 2024. Assembled mechanical metamaterials with integrated functionalities of programmable multistability and multitransition behaviors. Materials Horizons, 11: 6371-6380. doi: 10.1039/D4MH00906A [68] Henderson J, Mari T, Hewitt D, et al. 2023. Tactile estimation of hedonic and sensory properties during active touch: An electroencephalography study. European Journal of Neuroscience, 58: 3412-3431. doi: 10.1111/ejn.16101 [69] Hiroya I, Kevin K, Minoru T. 2017. Dielectric elastomer actuator with variable stiffness based on interlaminar electrostatic chucking. Electroactive Polymer Actuators and Devices (EAPAD), 10163: 116-121. [70] Huang C, Chen L. 2016. Negative Poisson’s ratio in modern functional materials. Advanced Materials, 28: 8079-8096. doi: 10.1002/adma.201601363 [71] Huang Y, Zhou J K, Ke P C, et al. 2023. A skin-integrated multimodal haptic interface for immersive tactile feedback. Nature Electronics, 6: 1020-1031. [72] Hyatt L P, Harne R L. 2022. Rapid pneumatic control of bimodal, hierarchical mechanical metamaterials. Advanced Engineering Materials, 24: 2101375. doi: 10.1002/adem.202101375 [73] Iiyoshi K, Lee J H, Dalaq A S, et al. 2024. Origami-inspired haptics: A literature review. IEEE Access, 12: 33309-33327. doi: 10.1109/ACCESS.2024.3371480 [74] Ion A, Frohnhofen J, Wall L, et al. 2016. Metamaterial mechanisms. Proceedings of the 29th Annual Symposium on User Interface Software and Technology, 529-539. [75] Isaac C W, Duddeck F. 2023. Recent progress in 4D printed energy-absorbing metamaterials and structures. Virtual and Physical Prototyping, 18: e2197436. doi: 10.1080/17452759.2023.2197436 [76] Jadhav S, Majit M R A, Shih B, et al. 2021. Variable stiffness devices using fiber jamming for application in soft robotics and wearable haptics. Soft Robotics, 9: 173-186. doi: 10.1089/soro.2019.0203 [77] Jang K-I, Chung H U, Xu S, et al. 2015. Soft network composite materials with deterministic and bio-inspired designs. Nature Communications, 6: 6566. doi: 10.1038/ncomms7566 [78] Jiang S, Liu X J, Liu J P, et al. 2022. Flexible metamaterial electronics. Advanced Materials, 34: 2200070. doi: 10.1002/adma.202200070 [79] Jiao P C, Mueller J, Raney J R, et al. 2023. Mechanical metamaterials and beyond. Nature Communications, 14: 6004. doi: 10.1038/s41467-023-41679-8 [80] Joshi K D, Maheshwari N, Patel H, et al. 2025. Divyawear—A wearable haptic cueing system for the visually impaired Indian people. International Journal of Computer Applications, 186: 54-67. doi: 10.5120/ijca2025924707 [81] Kadic M, Milton G W, van Hecke M, et al. 2019. 3D metamaterials. Nature Reviews Physics, 1: 198-210. doi: 10.1038/s42254-018-0018-y [82] Kałwak W, Reuter M, Łukowska M, et al. 2018. Guidelines for quantitative and qualitative studies of sensory substitution experience. Adaptive Behavior, 26: 111-127. doi: 10.1177/1059712318771690 [83] Khan M, Oh S, Song T-E, et al. 2025. Wearable haptics for orthotropic actuation based on perpendicularly nested auxetic SMA knotting. Advanced Materials, 37: 2411353. doi: 10.1002/adma.202411353 [84] Kieliba P, Clode D, Maimon-Mor R O, et al. 2021. Robotic hand augmentation drives changes in neural body representation. Science Robotics, 6: eabd7935. doi: 10.1126/scirobotics.abd7935 [85] Kim S Y, Braun D J. 2023. Variable stiffness floating spring leg: Performing net-zero energy cost tasks not achievable using fixed stiffness springs. IEEE Robotics and Automation Letters, 8: 5400-5407. doi: 10.1109/LRA.2023.3292584 [86] Koilias A, Mousas C, Anagnostopoulos C-N. 2020. I feel a moving crowd surrounds me: Exploring tactile feedback during immersive walking in a virtual crowd. Computer Animation and Virtual Worlds, 31: e1963. doi: 10.1002/cav.1963 [87] Kuder I K, Arrieta A F, Raither W E, et al. 2013. Variable stiffness material and structural concepts for morphing applications. Progress in Aerospace Sciences, 63: 33-55. doi: 10.1016/j.paerosci.2013.07.001 [88] Kumar R, Kumar M, Chohan J S, et al. 2022. Overview on metamaterial: History, types and applications. Materials Today: Proceedings, 56: 3016-3024. doi: 10.1016/j.matpr.2021.11.423 [89] Lakes R S. 2017. Negative-poisson & apos; s-ratio materials: Auxetic solids. Annual Review of Materials Research, 47: 63-81. doi: 10.1146/annurev-matsci-070616-124118 [90] Laschi C, Cianchetti M, Mazzolai B, et al. 2012. Soft robot arm inspired by the octopus. Advanced Robotics, 26: 709-727. doi: 10.1163/156855312X626343 [91] Lederman S J, Klatzky R L. 2009. Haptic perception: A tutorial. Attention, Perception, & Psychophysics, 71: 1439-1459. [92] Lee G, Lee S-J, Rho J, et al. 2023. Acoustic and mechanical metamaterials for energy harvesting and self-powered sensing applications. Materials Today Energy, 37: 101387. doi: 10.1016/j.mtener.2023.101387 [93] Li M Y, Ma J Y, Tang X L, et al. 2025. Double-tubular origami metamaterials with independently programmable and tunable mechanical and acoustic properties. Composites Part B: Engineering, 306: 112804. doi: 10.1016/j.compositesb.2025.112804 [94] Li M Y, Peng R, Ma J Y, et al. 2024. Programming the mechanical properties of double-corrugated metamaterials by varying mountain-valley assignments. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 382: 20240004. doi: 10.1098/rsta.2024.0004 [95] Li M Y, Zhou Z Y, Hao B X, et al. 2023. Design and deformation analysis of an inflatable metallic cylinder based on the Kresling origami pattern. Thin-Walled Structures, 188: 110859. doi: 10.1016/j.tws.2023.110859 [96] Li X, Gao L B, Zhou W Z, et al. 2019. Novel 2D metamaterials with negative Poisson’s ratio and negative thermal expansion. Extreme Mechanics Letters, 30: 100498. doi: 10.1016/j.eml.2019.100498 [97] Li Y, Baker E, Reissman T, et al. 2017a. Design of mechanical metamaterials for simultaneous vibration isolation and energy harvesting. Applied Physics Letters, 111: 251903. doi: 10.1063/1.5008674 [98] Li Y, Chen Y, Yang Y, et al. 2017b. Passive particle jamming and its stiffening of soft robotic grippers. IEEE Transactions on Robotics, 33: 446-455. doi: 10.1109/TRO.2016.2636899 [99] Li Y, Chen Z H, Xiao D B, et al. 2020. The dynamic response of shallow sandwich arch with auxetic metallic honeycomb core under localized impulsive loading. International Journal of Impact Engineering, 137: 103442. doi: 10.1016/j.ijimpeng.2019.103442 [100] Liang K, Zhang X P, Zhao Q, et al. 2025. Ideal energy-absorbing metamaterials based on self-locking bistable structures. Materials Horizons, 12: 4165-4176. [101] Lin Y, Gonzalez J T, Cui Z, et al. 2024. ConeAct: A multistable actuator for dynamic materials. Proceedings of the 2024 CHI Conference on Human Factors in Computing Systems, 324. [102] Liu J R, Qin H S, Liu Y L. 2018. Dynamic behaviors of phase transforming cellular structures. Composite Structures, 184: 536-544. doi: 10.1016/j.compstruct.2017.10.002 [103] Liu M, Dai Z W, Zhao Y D, et al. 2024. Tactile sensing and rendering patch with dynamic and static sensing and haptic feedback for immersive communication. ACS Applied Materials & Interfaces, 16: 53207-53219. doi: 10.1021/acsami.4c11050 [104] Liu Y M, Zhang X. 2011. Metamaterials: A new frontier of science and technology. Chemical Society Reviews, 40: 2494-2507. doi: 10.1039/c0cs00184h [105] Long J, Li J, Diao X, et al. 2024. Multistable soft actuator for physical human-robot interaction. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 4090-4097. [106] Lu F C, Lin B C, Ling X Y, et al. 2023. Controllable design of bi-material metamaterials with programmable thermal expansion and Poisson’s ratio. Composite Structures, 322: 117417. doi: 10.1016/j.compstruct.2023.117417 [107] Lu Z X, Wang Q S, Li X, et al. 2017. Elastic properties of two novel auxetic 3D cellular structures. International Journal of Solids and Structures, 124: 46-56. doi: 10.1016/j.ijsolstr.2017.05.031 [108] Luo H, Fu Y, Ding N, et al. 2022. Hap-pulse: A wearable vibrotactile glove for medical pulse wave rendering. IEEE Transactions on Haptics, 15: 280-291. doi: 10.1109/TOH.2022.3157832 [109] Lv C, Krishnaraju D, Konjevod G, et al. 2014. Origami based mechanical metamaterials. Scientific Reports, 4: 5979. doi: 10.1038/srep05979 [110] Majidi C, Wood R J. 2010. Tunable elastic stiffness with microconfined magnetorheological domains at low magnetic field. Applied Physics Letters, 97: 164104. doi: 10.1063/1.3503969 [111] Moscatelli A, Bianchi M, Ciotti S, et al. 2019. Touch as an auxiliary proprioceptive cue for movement control. Science Advances, 5: eaaw3121. doi: 10.1126/sciadv.aaw3121 [112] Nayakanti N, Tawfick S H, Hart A J. 2018. Twist-coupled Kirigami cells and mechanisms. Extreme Mechanics Letters, 21: 17-24. doi: 10.1016/j.eml.2017.09.005 [113] Obrist M, Gatti E, Maggioni E, et al. 2017. Multisensory experiences in HCI. IEEE MultiMedia, 24: 9-13. doi: 10.1109/mmul.2017.33 [114] Oh S, Jang J, Ji W, et al. 2025. Embodied auxetic intelligence in a glove-type wearable haptic interface connecting humans to robots and the metaverse. Advanced Functional Materials, n/a: 2502222. [115] Oh S, Song T-E, Mahato M, et al. 2023. Easy-to-wear auxetic SMA knot-architecture for spatiotemporal and multimodal haptic feedbacks. Advanced Materials, 35: 2304442. [116] Osman M M, Shazly M, El-Danaf E A, et al. 2020. Compressive behavior of stretched and composite microlattice metamaterial for energy absorption applications. Composites Part B: Engineering, 184: 107715. doi: 10.1016/j.compositesb.2019.107715 [117] Ou H F, Hu L L, Wang Y B, et al. 2024. High-efficient and reusable impact mitigation metamaterial based on compression-torsion coupling mechanism. Journal of the Mechanics and Physics of Solids, 186: 105594. doi: 10.1016/j.jmps.2024.105594 [118] Patel S, Rao Z, Yang M, et al. 2025. Wearable haptic feedback interfaces for augmenting human touch. Advanced Functional Materials, n/a: 2417906. [119] Perret J, Poorten E V. 2018. Touching virtual reality: A review of haptic gloves. Actuator 2018; 16th International Conference on New Actuators, 1-5. [120] Pocius R, Zamani N, Culbertson H, et al. 2020. Communicating robot goals via haptic feedback in manipulation tasks. Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, 591-593. [121] Proulx M J, Brown D J, Pasqualotto A, et al. 2014. Multisensory perceptual learning and sensory substitution. Neuroscience & Biobehavioral Reviews, 41: 16-25. doi: 10.1016/j.neubiorev.2012.11.017 [122] Pyo S, Eun Y, Sim J, et al. 2022. Carbon nanotube-graphene hybrids for soft electronics, sensors, and actuators. Micro and Nano Systems Letters, 10: 9. doi: 10.1186/s40486-022-00151-w [123] Pyo S, Park K. 2024. Mechanical metamaterials for sensor and actuator applications. International Journal of Precision Engineering and Manufacturing-Green Technology, 11: 291-320. doi: 10.1007/s40684-023-00549-w [124] Qi J, Gao F, Sun G, et al. 2023. HaptGlove—Untethered pneumatic glove for multimode haptic feedback in reality–virtuality continuum. Advanced Science, 10: 2301044. doi: 10.1002/advs.202301044 [125] Qi J X, Chen Z H, Jiang P, et al. 2022. Recent progress in active mechanical metamaterials and construction principles. Advanced Science, 9: 2102662. doi: 10.1002/advs.202102662 [126] Quinn R, Murtough S, de Winton H, et al. 2024. A shape-changing haptic navigation interface for vision impairment. Scientific Reports, 14: 29223. doi: 10.1038/s41598-024-79845-7 [127] Rätz R, Conti F, Thaler I, et al. 2024. Enhancing stroke rehabilitation with whole-hand haptic rendering: Development and clinical usability evaluation of a novel upper-limb rehabilitation device. Journal of NeuroEngineering and Rehabilitation, 21: 172. doi: 10.1186/s12984-024-01439-1 [128] Restrepo D, Mankame N D, Zavattieri P D. 2015. Phase transforming cellular materials. Extreme Mechanics Letters, 4: 52-60. doi: 10.1016/j.eml.2015.08.001 [129] Sarkar M, Notbohm J. 2023. Bioinspired fiber networks with tunable mechanical properties by additive manufacturing. Journal of Applied Mechanics, 90. [130] Scheggi S, Talarico A, Prattichizzo D. 2014. A remote guidance system for blind and visually impaired people via vibrotactile haptic feedback. 22nd Mediterranean Conference on Control and Automation, 20-23. [131] Seyedkanani A, Akbarzadeh A. 2022. Magnetically assisted rotationally multistable metamaterials for tunable energy trapping–dissipation. Advanced Functional Materials, 32: 2207581. doi: 10.1002/adfm.202207581 [132] Shazhaev I, Mihaylov D, Shafeeg A. 2023. A review of haptic technology applications in healthcare. Open Journal of Applied Sciences, 13. [133] Shull P B, Damian D D. 2015. Haptic wearables as sensory replacement, sensory augmentation and trainer—A review. Journal of NeuroEngineering and Rehabilitation, 12: 59. doi: 10.1186/s12984-015-0055-z [134] Sinha P, Mukhopadhyay T. 2023. Programmable multi-physical mechanics of mechanical metamaterials. Materials Science and Engineering: R: Reports, 155: 100745. doi: 10.1016/j.mser.2023.100745 [135] Smith C W, Grima J N, Evans K E. 2000. A novel mechanism for generating auxetic behaviour in reticulated foams: Missing rib foam model. Acta Materialia, 48: 4349-4356. doi: 10.1016/S1359-6454(00)00269-X [136] Song B X, Guo J G, Qu C, et al. 2025. Design and analysis of a novel star-shaped auxetic cylindrical metamaterial with excellent mechanical performance. Engineering Structures, 332: 120047. doi: 10.1016/j.engstruct.2025.120047 [137] Song J-H, Min S-H, Kim S-G, et al. 2022. Multi-functionalization strategies using nanomaterials: A review and case study in sensing applications. International Journal of Precision Engineering and Manufacturing-Green Technology, 9: 323-347. doi: 10.1007/s40684-021-00356-1 [138] Sorrentino A, Castagnetti D. 2023. Novel polyhedral mechanical metamaterial exhibiting negative Poisson’s ratio. Smart Materials and Structures, 32: 035008. doi: 10.1088/1361-665X/acb3a3 [139] Sun F Q, Lu Q F, Hao M M, et al. 2022. An artificial neuromorphic somatosensory system with spatio-temporal tactile perception and feedback functions. npj Flexible Electronics, 6: 72. doi: 10.1038/s41528-022-00202-7 [140] Talhan A, Yoo Y, Cooperstock J R. 2024. Soft pneumatic haptic wearable to create the illusion of human touch. IEEE Transactions on Haptics, 17: 177-190. doi: 10.1109/TOH.2023.3305495 [141] Tan X, Wang B, Zhu S, et al. 2020. Novel multidirectional negative stiffness mechanical metamaterials. Smart Materials and Structures, 29: 015037. doi: 10.1088/1361-665X/ab47d9 [142] Tan X J, Cao B, Liu X, et al. 2025. Negative stiffness mechanical metamaterials: A review. Smart Materials and Structures, 34: 013001. doi: 10.1088/1361-665X/ad97fe [143] Tanaka Y, Shiraki S, Katayama K, et al. 2021. Bilaterally shared haptic perception for human-robot collaboration in grasping operation. Journal of Robotics and Mechatronics, 33. [144] Teng X C, Chen L, Cao M J, et al. 2025. Bio-inspired Kresling origami metamaterial with enhanced mechanical properties and designable step resistance curve. Thin-Walled Structures, 214: 113395. doi: 10.1016/j.tws.2025.113395 [145] Verstraten T, Pablo L-G, Bert L, et al. 2022. Improving the performance of industrial machines with variable stiffness springs. Mechanics Based Design of Structures and Machines, 50: 115-134. doi: 10.1080/15397734.2020.1713155 [146] Wang C L, Guo H W, Liu R Q, et al. 2024a. Reconfigurable origami-inspired multistable metamorphous structures. Science Advances, 10: eadk8662. doi: 10.1126/sciadv.adk8662 [147] Wang T, Zhang J, Li Y, et al. 2019. Electrostatic layer jamming variable stiffness for soft robotics. IEEE/ASME Transactions on Mechatronics, 24: 424-433. doi: 10.1109/TMECH.2019.2893480 [148] Wang W D, Ding Z B, Lee Y, et al. 2022. Engineering liquid-vapor phase transition for refreshable haptic interfaces. Research, 2022. [149] Wang X, Qu H, Zhao K, et al. 2024b. Kresling origami derived structures and inspired mechanical metamaterial. Smart Materials and Structures, 33: 075030. doi: 10.1088/1361-665X/ad5a5a [150] Wang X T, Wang B, Wen Z H, et al. 2018. Fabrication and mechanical properties of CFRP composite three-dimensional double-arrow-head auxetic structures. Composites Science and Technology, 164: 92-102. doi: 10.1016/j.compscitech.2018.05.014 [151] Wang Y, Wang J-Y, Luo F. 2011. Why self-induced pain feels less painful than externally generated pain: Distinct brain activation patterns in self- and externally generated pain. PLOS ONE, 6: e23536. doi: 10.1371/journal.pone.0023536 [152] Wang Y Y, Liang J M, Yu J K, et al. 2024c. Multiscale haptic interfaces for metaverse. Device, 2: 100326. doi: 10.1016/j.device.2024.100326 [153] Wu L L, Li B, Zhou J. 2016. Isotropic negative thermal expansion metamaterials. ACS Applied Materials & Interfaces, 8: 17721-17727. doi: 10.1021/acsami.6b05717 [154] Xi K L, Jiang X Y, Zhao D C, et al. 2025. Design and visualization of a hierarchical metamaterial with tunable stiffness. Research, 8: 0874. doi: 10.34133/research.0874 [155] Xiao C D, Tian R L, Zhang X L, et al. 2024. Variable stiffness and zero Poisson’s ratio of the butterfly-shaped mechanical metamaterial. Composites Communications, 49: 101958. doi: 10.1016/j.coco.2024.101958 [156] Xu L, Chen H Y. 2021. Transformation metamaterials. Advanced Materials, 33: 2005489. doi: 10.1002/adma.202005489 [157] Xu R, Chen C Q, Sun J P, et al. 2023a. The design, manufacture and application of multistable mechanical metamaterials—A state-of-the-art review. International Journal of Extreme Manufacturing, 5: 042013. doi: 10.1088/2631-7990/acf96a [158] Xu W Y, Zhang L, Zhang B Q, et al. 2023b. Crushing behavior of contact-aided AlSi10Mg sandwich structure based on chiral mechanical metamaterials. International Journal of Mechanical Sciences, 260: 108636. doi: 10.1016/j.ijmecsci.2023.108636 [159] Yan S, Wu L L, Wen Y Z, et al. 2025. Snap-through instability in mechanical metamaterials. Responsive Materials, 3: e20240035. [160] Yang L, Harrysson O, West H, et al. 2015. Mechanical properties of 3D re-entrant honeycomb auxetic structures realized via additive manufacturing. International Journal of Solids and Structures, 69-70: 475-490. [161] Yang X Z, Lin C, Chen X D, et al. 2022. Structure deformation and curvature sensing of PIEZO1 in lipid membranes. Nature, 604: 377-383. doi: 10.1038/s41586-022-04574-8 [162] Yang Y, Zhang X, Maiolino P, et al. 2023. Linkage-based three-dimensional kinematic metamaterials with programmable constant Poisson’s ratio. Materials & Design, 233: 112249. doi: 10.1016/j.matdes.2023.112249 [163] Yi J, Lyu R, Li Y, et al. 2025a. Stability-enhanced variable stiffness metamaterial with controllable force-transferring path. Advanced Functional Materials, 35: 2413789. [164] Yi J X, Lyu R H, Li Y W, et al. 2025b. Stability-enhanced variable stiffness metamaterial with controllable force-transferring path. Advanced Functional Materials, 35: 2413789. [165] Yin X, Wu J, Yan J, et al. 2024. Design of an origami-inspired haptic interface for catheter interventional surgery. IEEE Sensors Journal, 24: 6867-6879. doi: 10.1109/jsen.2024.3350164 [166] Yu D, Hu G, Ding W, et al. 2023. Zero-thermal-expansion metamaterial with broadband vibration suppression. International Journal of Mechanical Sciences, 258: 108590. doi: 10.1016/j.ijmecsci.2023.108590 [167] Yu X, Zhou J, Liang H, et al. 2018. Mechanical metamaterials associated with stiffness, rigidity and compressibility: A brief review. Progress in Materials Science, 94: 114-173. doi: 10.1016/j.pmatsci.2017.12.003 [168] Yu X G, Xie Z Q, Yu Y, et al. 2019. Skin-integrated wireless haptic interfaces for virtual and augmented reality. Nature, 575: 473-479. doi: 10.1038/s41586-019-1687-0 [169] Yuan S Q, Chua C K, Zhou K. 2019. 3D-printed mechanical metamaterials with high energy absorption. Advanced Materials Technologies, 4: 1800419. doi: 10.1002/admt.201800419 [170] Zhai Z R, Wang Y, Jiang H Q. 2018. Origami-inspired, on-demand deployable and collapsible mechanical metamaterials with tunable stiffness. Proceedings of the National Academy of Sciences, 115: 2032-2037. doi: 10.1073/pnas.1720171115 [171] Zhang H, Guo X G, Wu J, et al. 2018. Soft mechanical metamaterials with unusual swelling behavior and tunable stress-strain curves. Science Advances, 4: eaar8535. doi: 10.1126/sciadv.aar8535 [172] Zhang L, Yan S, Liu W, et al. 2025. Mechanical metamaterials with negative Poisson’s ratio: A review. Engineering Structures, 329: 119838. doi: 10.1016/j.engstruct.2025.119838 [173] Zhang L W, Bai Z H, Chen Y F. 2022a. Dual-functional hierarchical mechanical metamaterial for vibration insulation and energy absorption. Engineering Structures, 271: 114916. doi: 10.1016/j.engstruct.2022.114916 [174] Zhang Q, Sun Y X. 2024. Novel metamaterial structures with negative thermal expansion and tunable mechanical properties. International Journal of Mechanical Sciences, 261: 108692. doi: 10.1016/j.ijmecsci.2023.108692 [175] Zhang Y, Pan Y, Han D, et al. 2023a. A hybrid design for bending and stretching dominated metamaterial with tailorable thermal expansion. Composite Structures, 323: 117474. doi: 10.1016/j.compstruct.2023.117474 [176] Zhang Y, Sun L, Ren X, et al. 2022b. Design and analysis of an auxetic metamaterial with tuneable stiffness. Composite Structures, 281: 114997. doi: 10.1016/j.compstruct.2021.114997 [177] Zhang Y H, Zhang X, Li M, et al. 2024. The rigid and flat-foldable kirigami cubes. International Journal of Mechanical Sciences, 282: 109605. doi: 10.1016/j.ijmecsci.2024.109605 [178] Zhang Z, Chen G, Xun Y, et al. 2023b. Bioinspired rigid-soft hybrid origami actuator with controllable versatile motion and variable stiffness. IEEE Transactions on Robotics, 39: 4768-4784. doi: 10.1109/TRO.2023.3311630 [179] Zhang Z, Tang S, Fan W, et al. 2022c. Design and analysis of hybrid-driven origami continuum robots with extensible and stiffness-tunable sections. Mechanism and Machine Theory, 169: 104607. doi: 10.1016/j.mechmachtheory.2021.104607 [180] Zhang Z, Xu Z H, Emu L Q, et al. 2023c. Active mechanical haptics with high-fidelity perceptions for immersive virtual reality. Nature Machine Intelligence, 5: 643-655. doi: 10.1038/s42256-023-00671-z [181] Zheng B B, Zhong R C, Chen X, et al. 2019. A novel metamaterial with tension-torsion coupling effect. Materials & Design, 171: 107700. doi: 10.1016/j.matdes.2019.107700 [182] Zheng H K, Han S H, Li S J, et al. 2024. A novel multi-resonator honeycomb metamaterial with enhanced impact mitigation. European Journal of Mechanics-A/Solids, 105: 105272. doi: 10.1016/j.euromechsol.2024.105272 [183] Zhou Y C, Ye L, Chen Y. 2024. Developing three-dimensional mechanical metamaterials with tailorable bandgaps for impact mitigation. Journal of Physics D: Applied Physics, 57: 195501. doi: 10.1088/1361-6463/ad2478 [184] Zuo S Y, Iijima K, Tokumiya T, et al. 2014. Variable stiffness outer sheath with “Dragon skin” structure and negative pneumatic shape-locking mechanism. International Journal of Computer Assisted Radiology and Surgery, 9: 857-865. doi: 10.1007/s11548-014-0981-4 -

 下载:
下载:








计量
- 文章访问数: 465
- HTML全文浏览量: 102
- PDF下载量: 142
- 被引次数: 0