

-
摘要: 虚单元方法是近几年在计算领域迅速发展的一种先进数值方法, 相比于有限元方法, 该方法放松了对单元凸凹性的限制, 可适用于任意形状的多边形单元, 因而在处理悬挂节点、接触、多晶体变形等特定问题方面具有优势, 是当前计算力学领域的国际前沿与热点方向. 本文全面综述了虚单元方法的理论发展, 通过介绍该方法在泊松方程、线弹性、非线性等问题中的应用, 向读者展示了虚单元法的理论核心以及它和有限元方法的异同. 尽管虚单元法的发展目前还处在起步阶段, 但该方法在诸多的非线性问题、接触问题、裂纹扩展以及多场耦合等方面展现出了巨大潜力. 通过对虚单元方法最新理论与应用进展的综述, 为面临单元凸凹性等问题苦恼的计算领域科研工作者提供一种新的解决方案; 同时为对工程科学计算感兴趣的青年科研人员提供关于虚单元方法的快速而系统的全面认知, 以期青年学者能融会贯通, 发展出适应我国计算力学需求的新型算法与高性能软件.Abstract: Virtual Element Method (VEM) is a recently-developed numerical method suitable for arbitrarily convex or concave cells. This benefits the VEM to handle hanging nodes, contacts and polycrystalline deformations. We here illustrate the theory of the VEM via the Poisson equation and the elastic problem, and summarize its applications to non-linear problems. Compared to the Finite Element Method (FEM), the characteristics of the VEM are explained in details. The VEM has demonstrated potentials to model contacts, cracks, coupling of multiple physics, and etc. We hope that this review can provides an alternative means for software developers in computational mechanics.
-

图 7 有限变形下的冲压问题. (a)模型, (b)可压缩材料的冲压变形, (c)不可压缩材料冲压变形(修改自 (Wriggers et al. 2017))
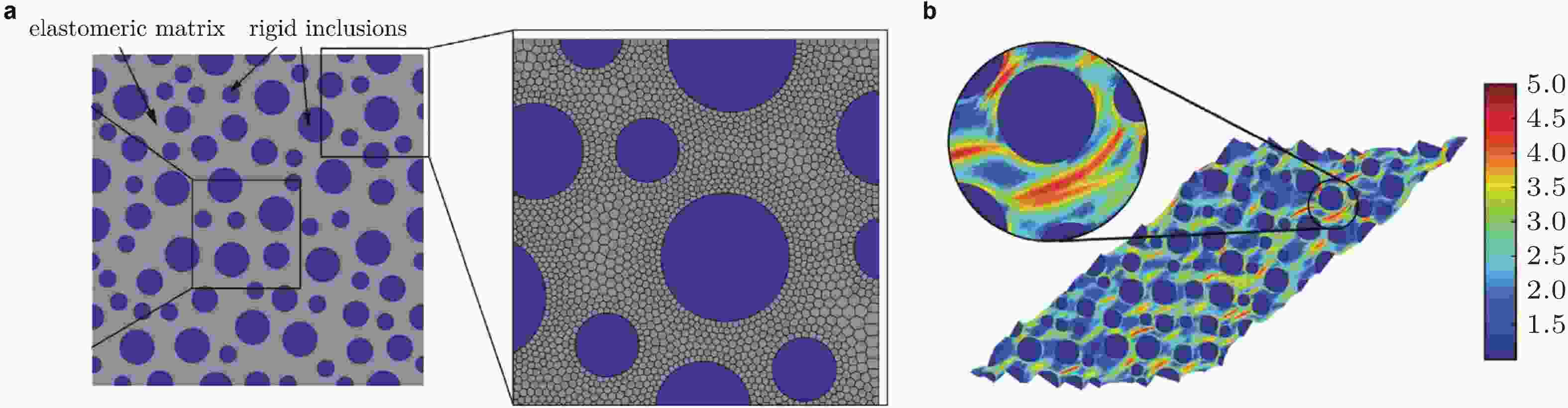
图 8 弹性多孔材料的有限变形. (a)模型, (b)剪应变为 1.345 下的最大应变分布(修改自(Chi et al. 2017))
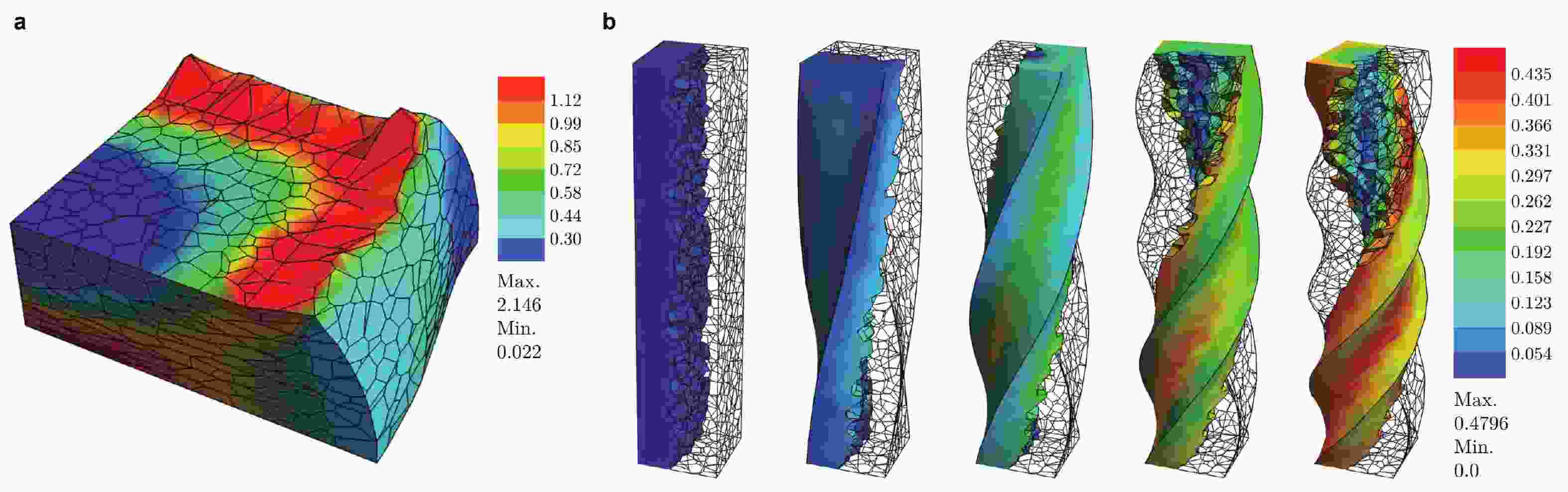
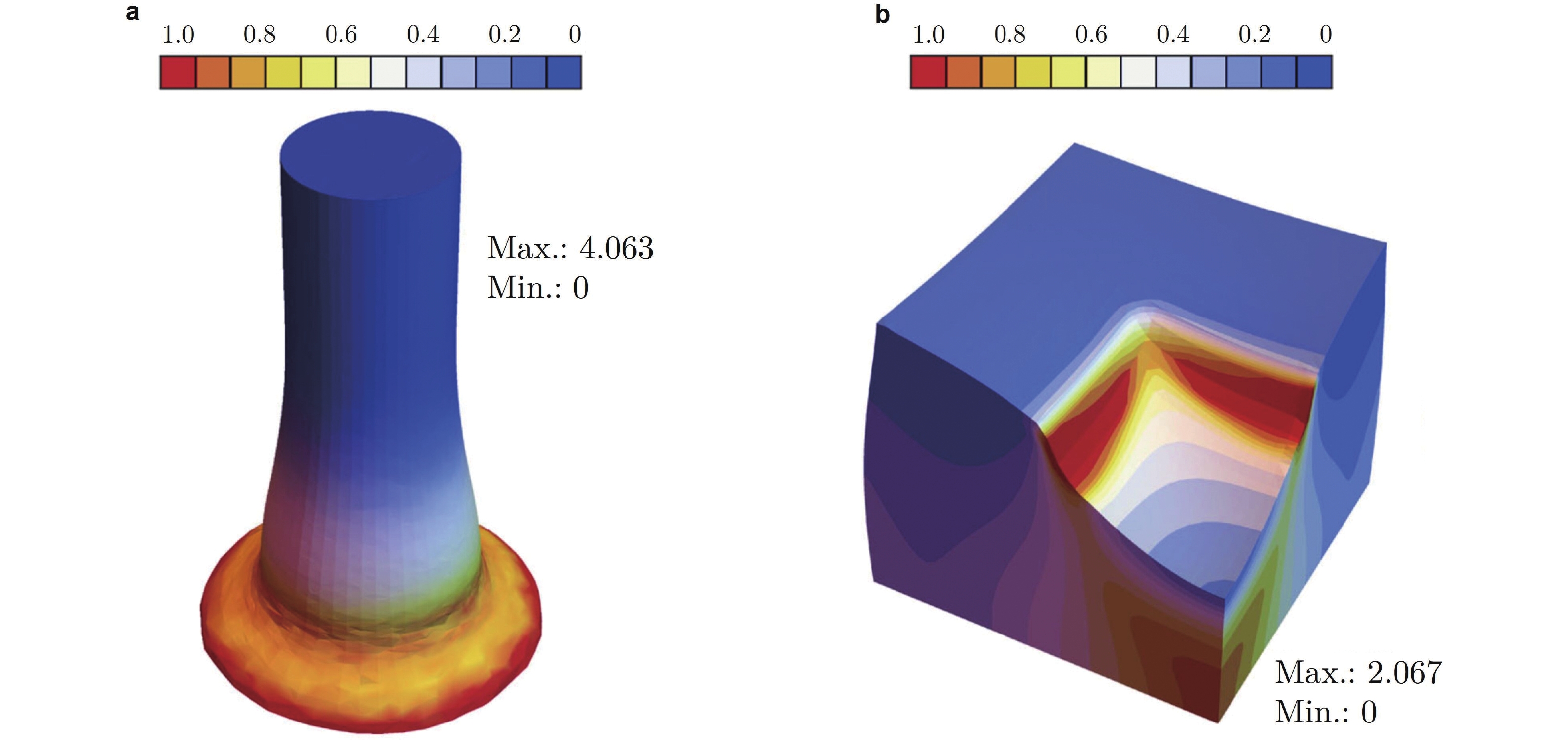
图 9 准静态大变形弹塑性问题的等效塑性应变分布. (a)冲压, (b)扭转 (修改自(Hudobivnik et al. 2019))
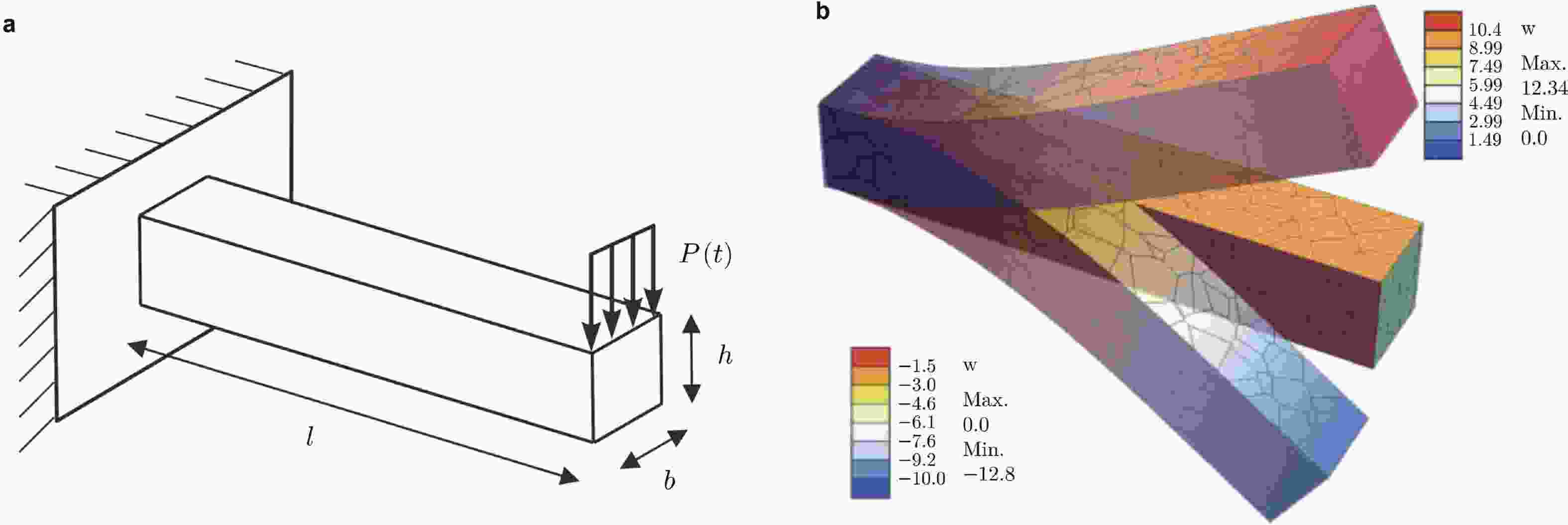
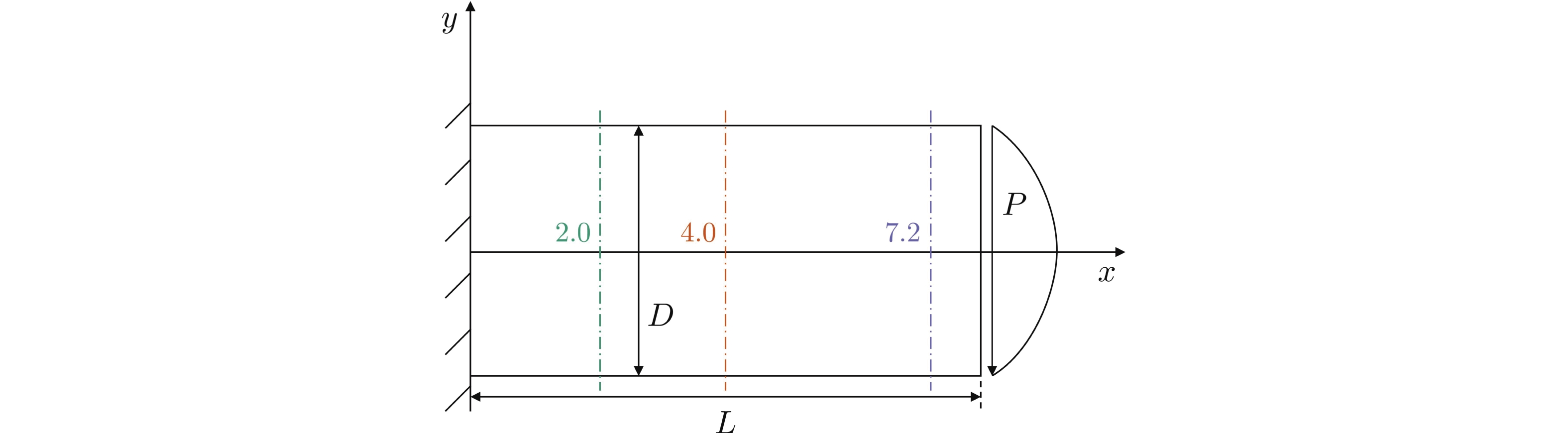
图 10 悬臂梁振动问题. (a)模型, (b)垂向位移时间演化(修改自 (Cihan et al. 2021b))
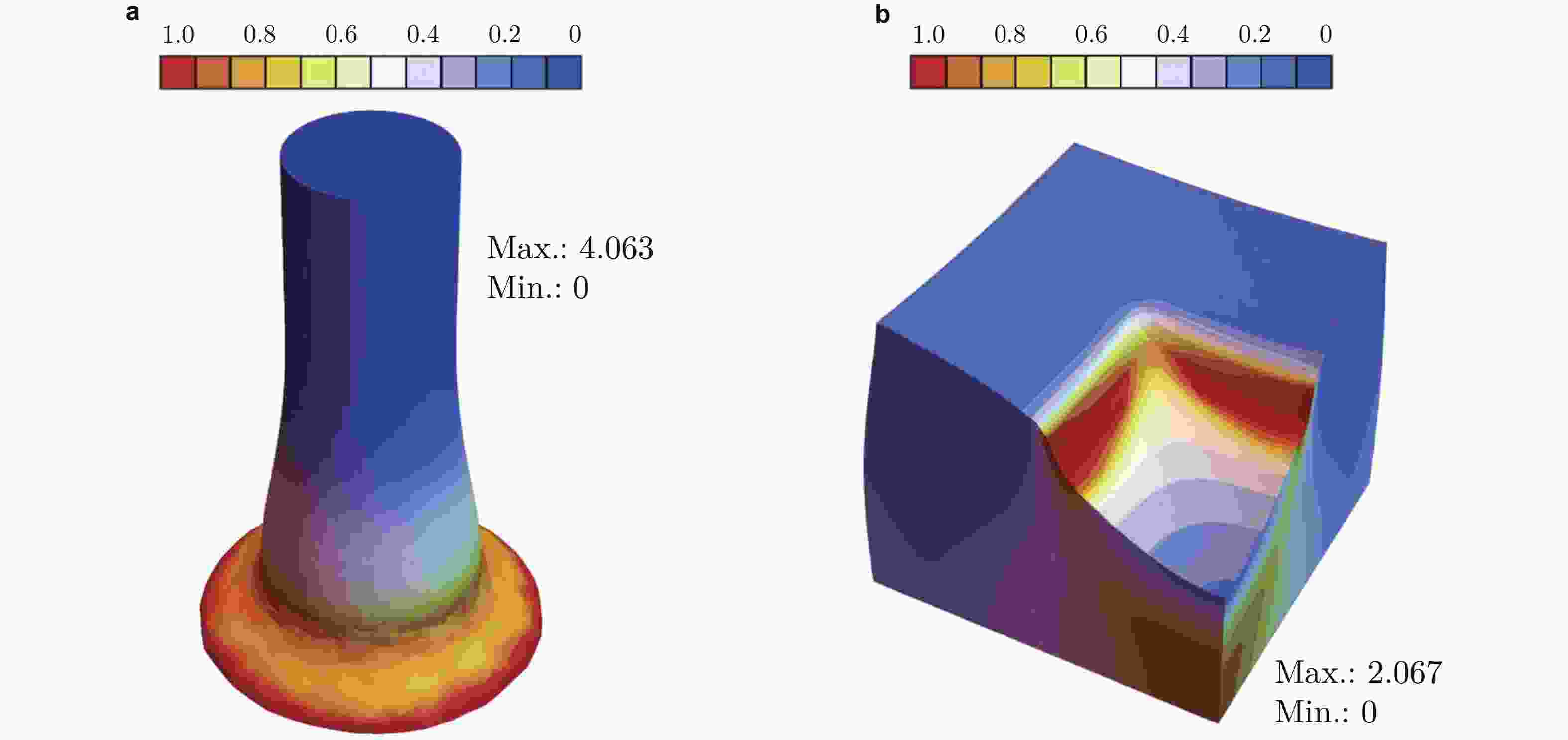
图 11 弹塑性动力学问题的塑性应变. (a)泰勒杆, (b)冲压 (修改自 (Cihan et al. 2021a))
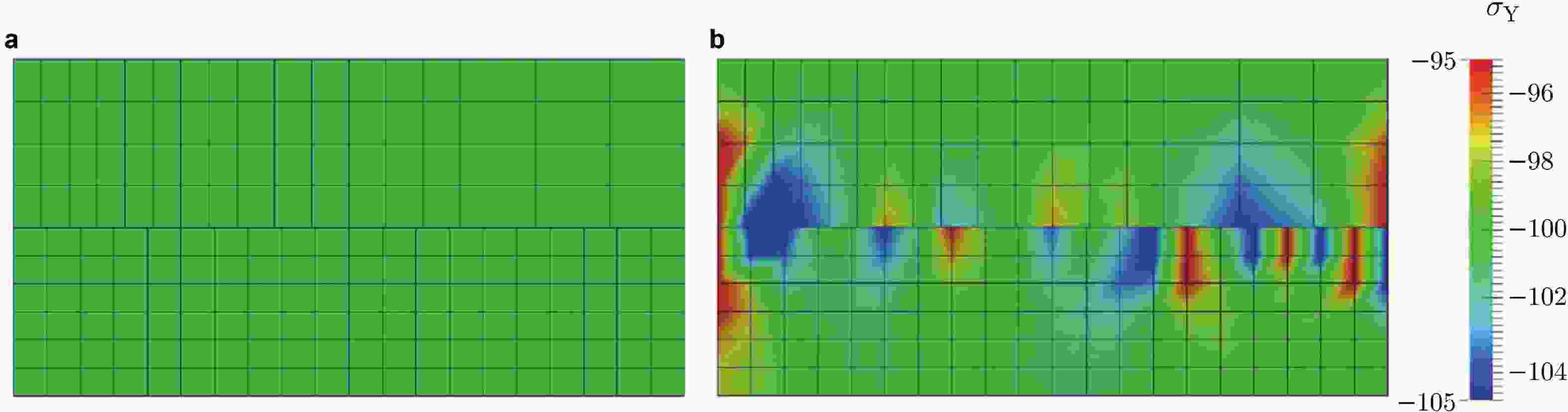
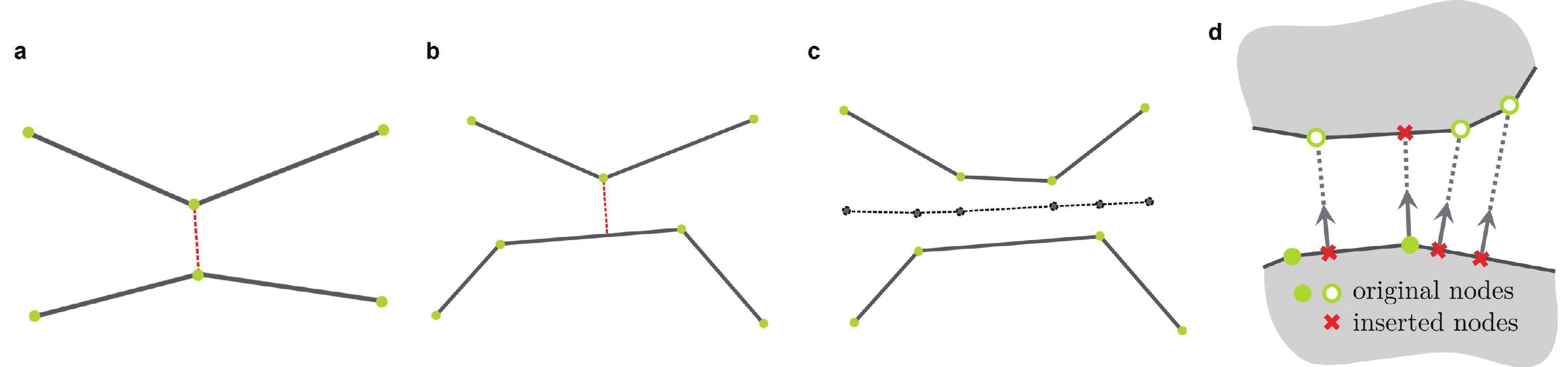
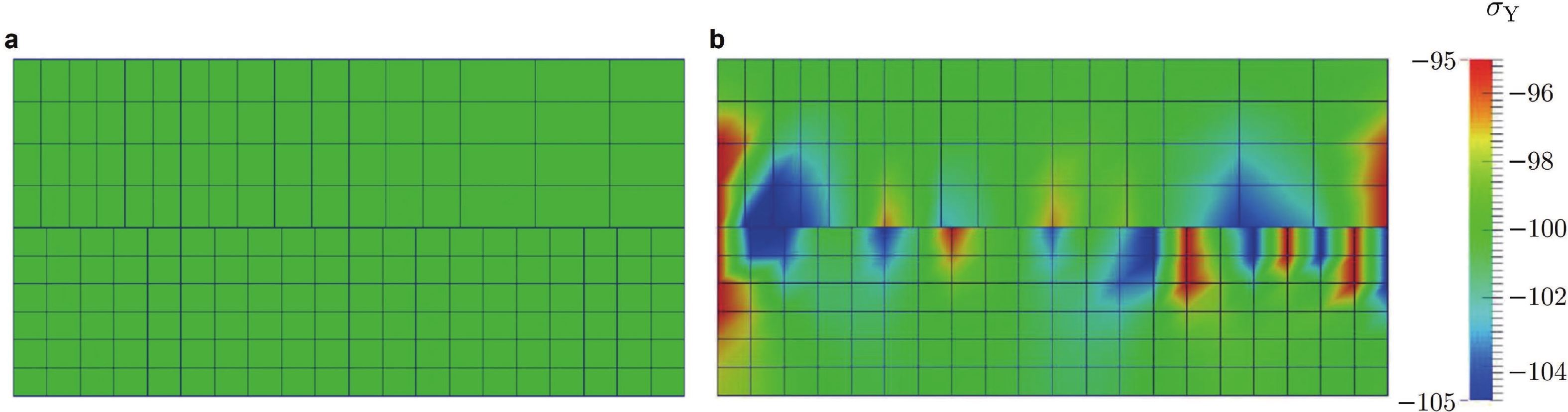
图 13 接触问题的分片测试. (a)虚单元法, (b)有限元点−线格式(修改自(Wriggers et al. 2016))

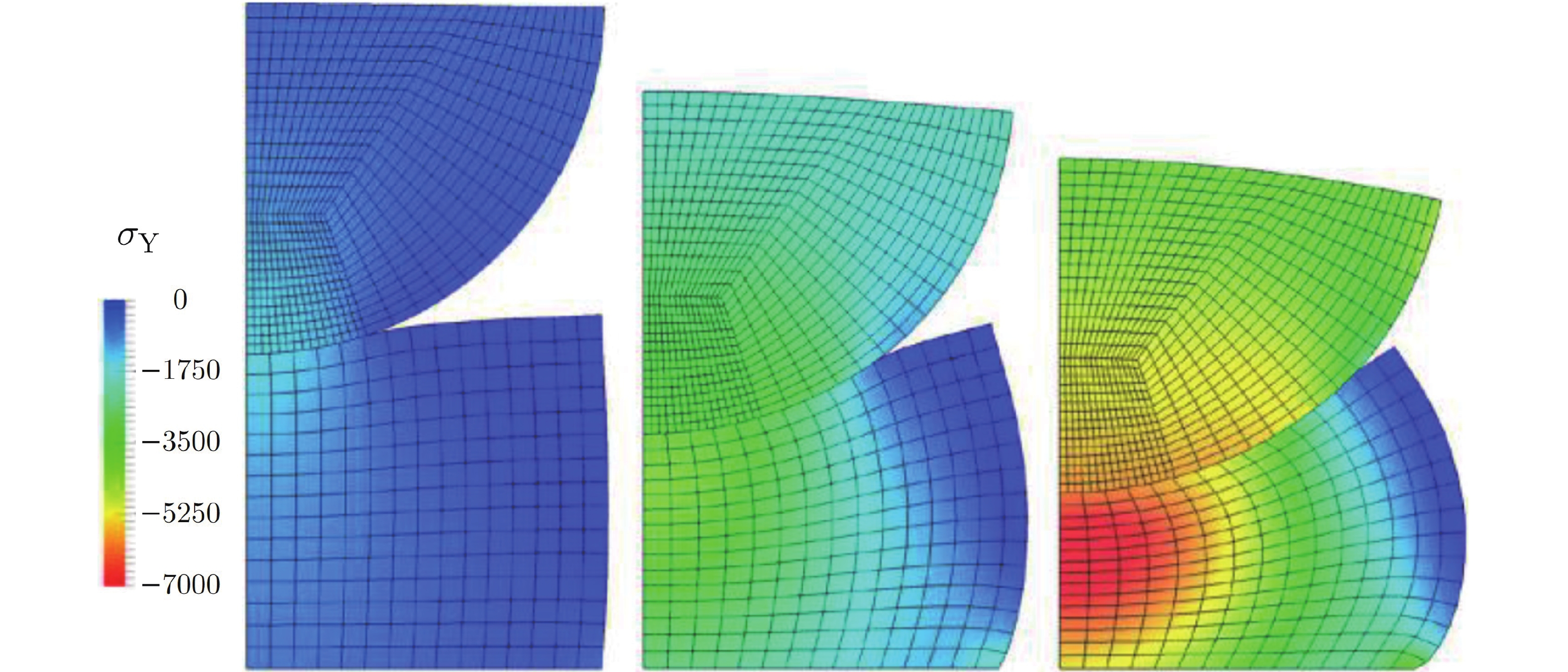
图 14 大变形条件下的赫兹接触问题(修改自 (Wriggers and Rust, 2019))

图 15 颗粒材料沙漏过程(修改自 (Gay Neto et al. 2021))
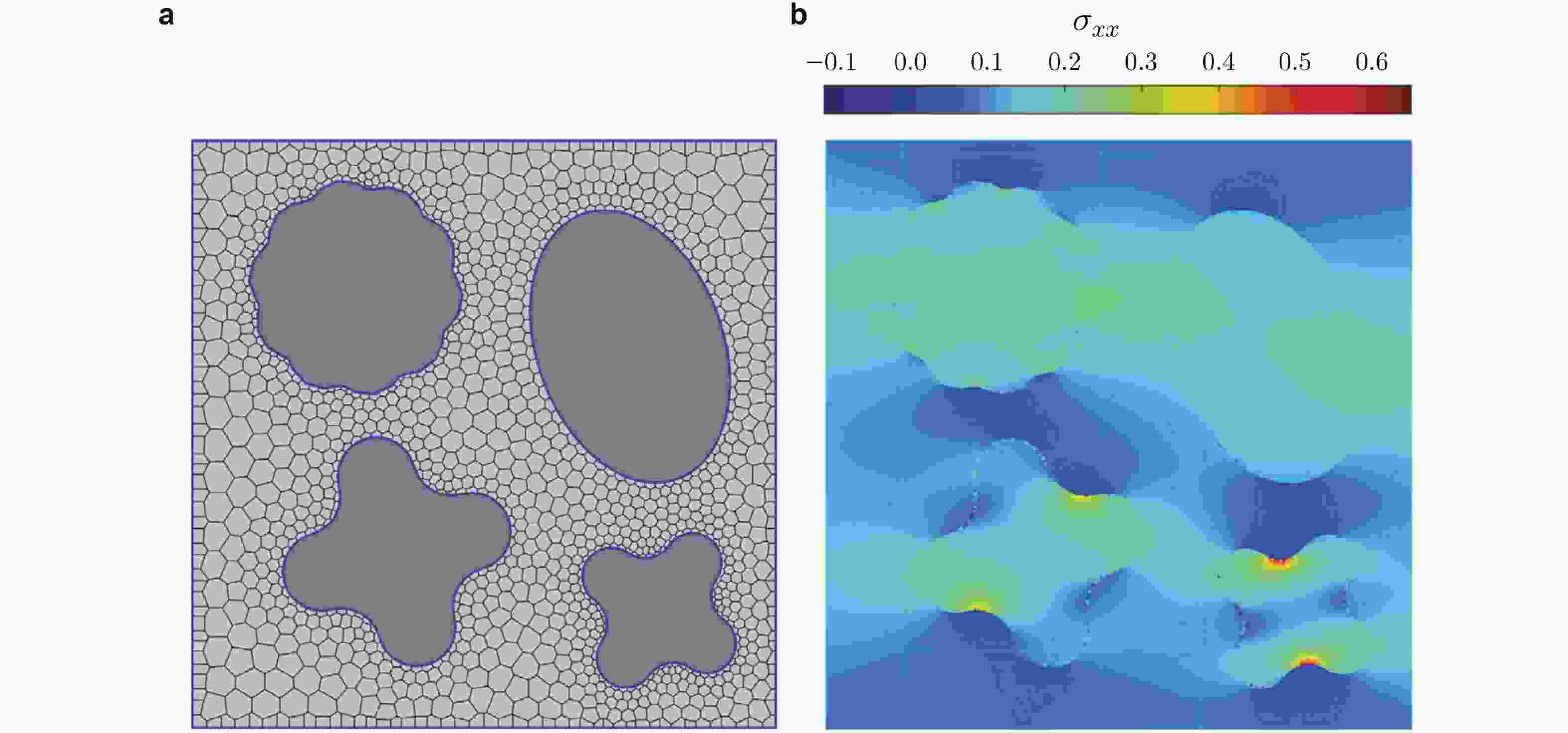
图 16 虚单元法与边界元法模拟非均匀材料. (a)网格, (b)单轴拉伸条件下的应力分布(修改自 (Lo Cascio et al. 2021))
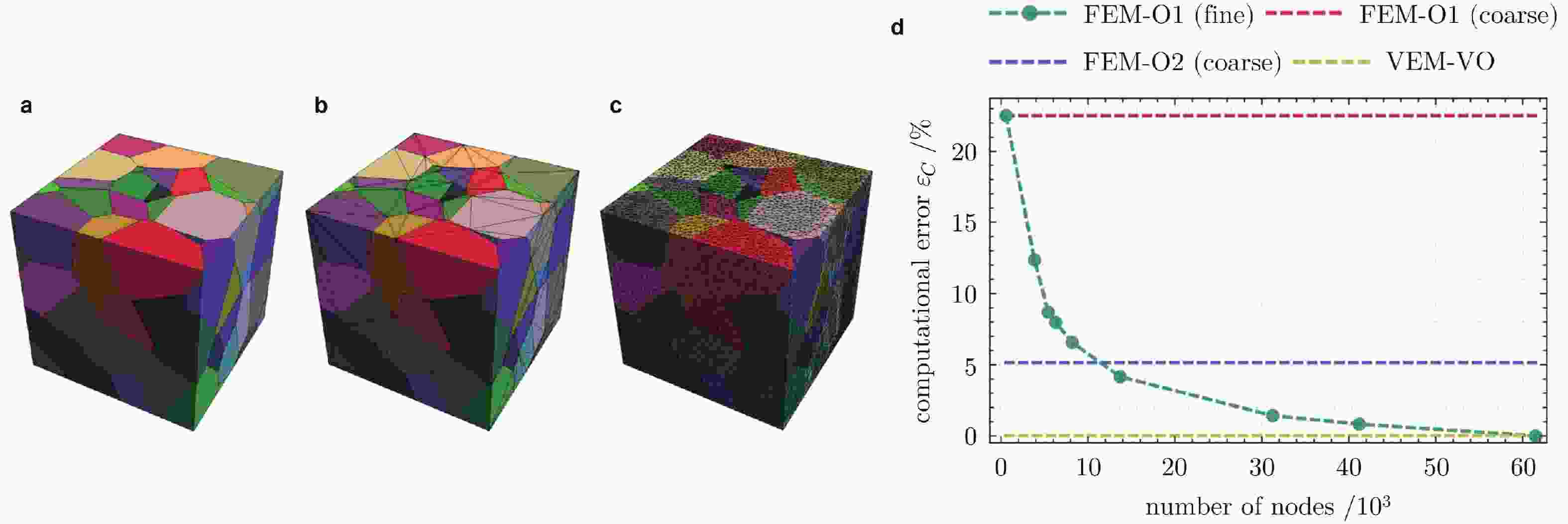
图 17 多晶结构均质化. (a)虚单元法网格, (b)粗糙的四面体网格, (c)精细的四面体网格, (d)
$ \mathrm{BaNiO_3} $ ,中度各向异性,六方晶系晶胞(修改自 (Böhm et al. 2021b))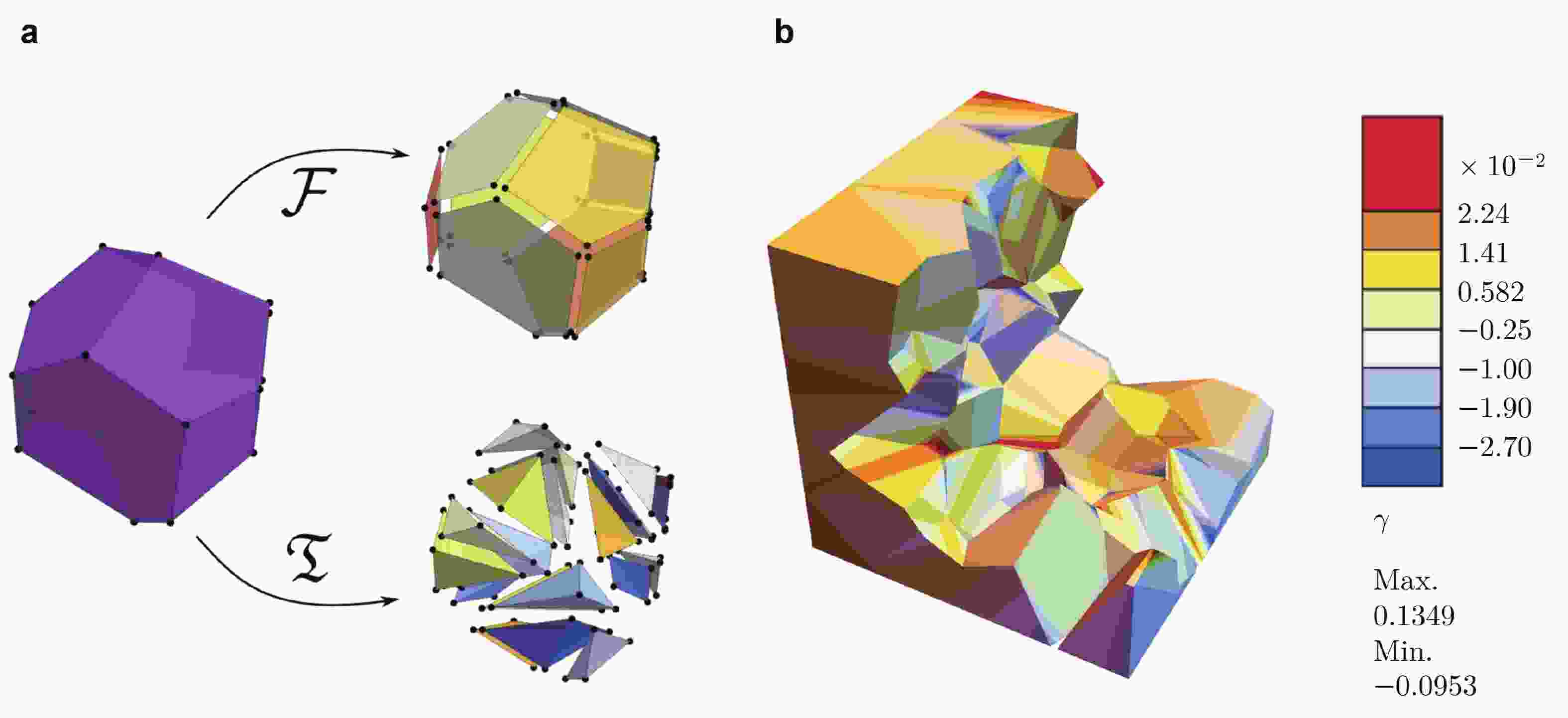
图 18 虚单元法模拟晶体塑性. (a)单个晶格网格分解为界面网格与内部四面体网格, (b)单轴拉伸条件下 FCC 晶格结构的剪应变(修改自 (Böhm et al. 2021a))
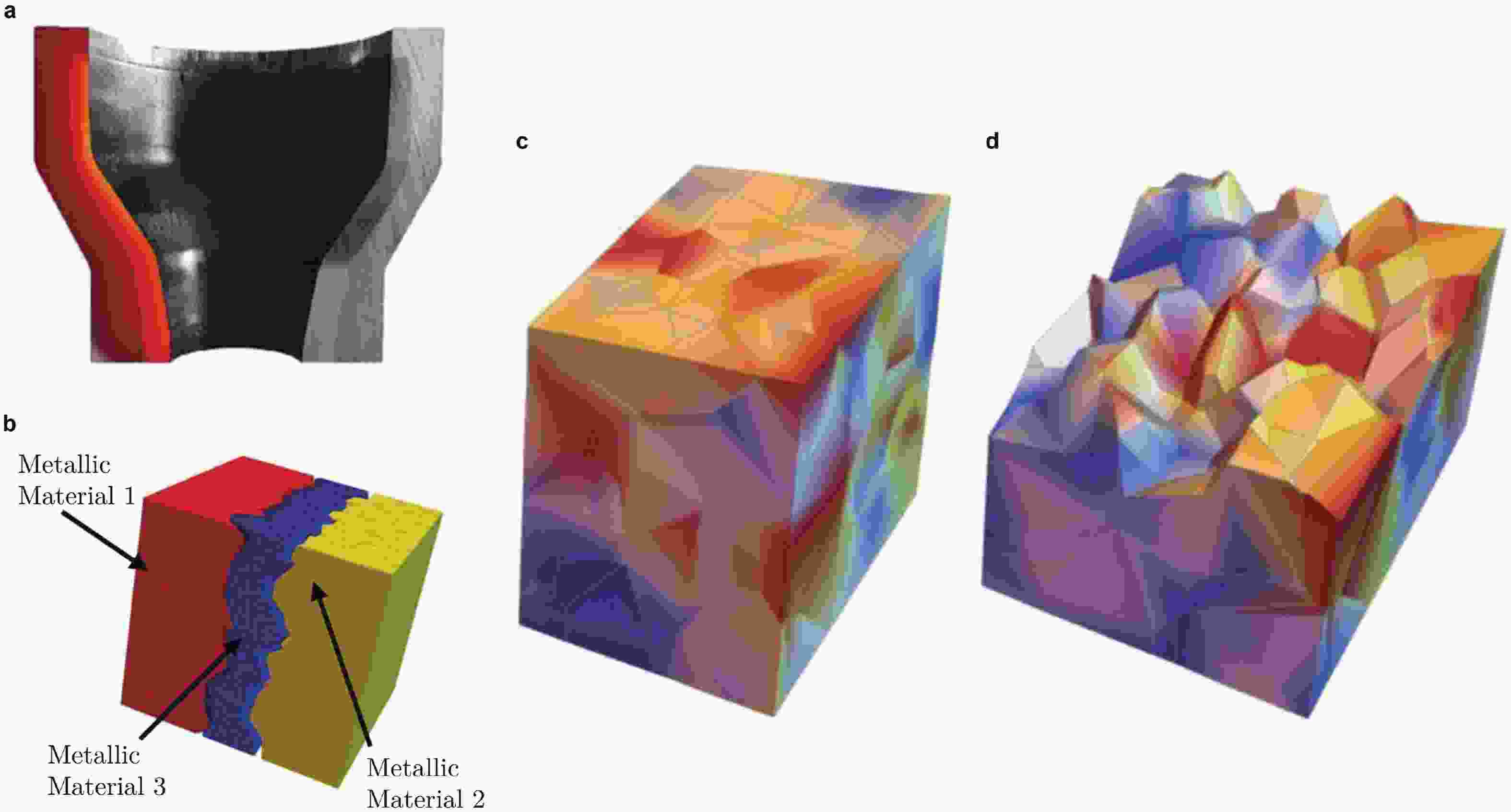
图 19 虚单元方法分析轴承衬套中不同材料连接区域的多晶塑性模型. (a)轴承衬套示意, (b)三种材料连接区域的代表性体积单元, (c) FCC 晶格在
$ (1 1 1) $ 滑移面上剪切应变率$ \dot{\gamma}_1 $ 的分布, (d)等效 von Mises 应力分布(修改自 (Behrens et al. 2020))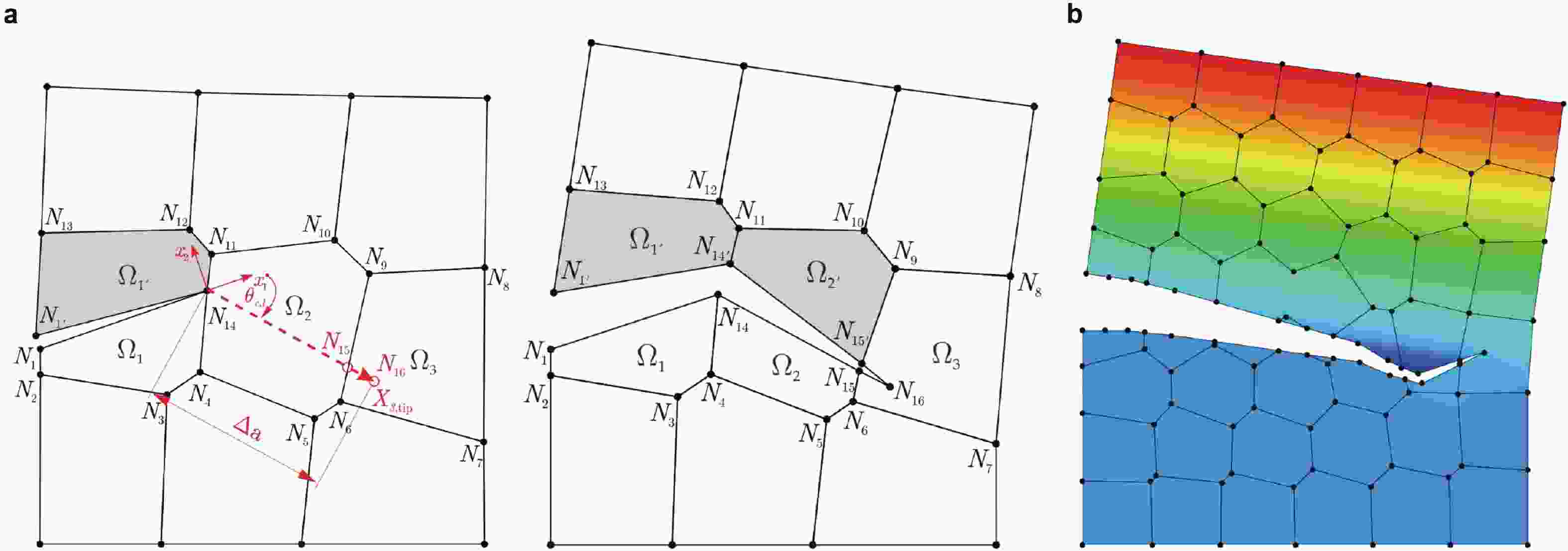
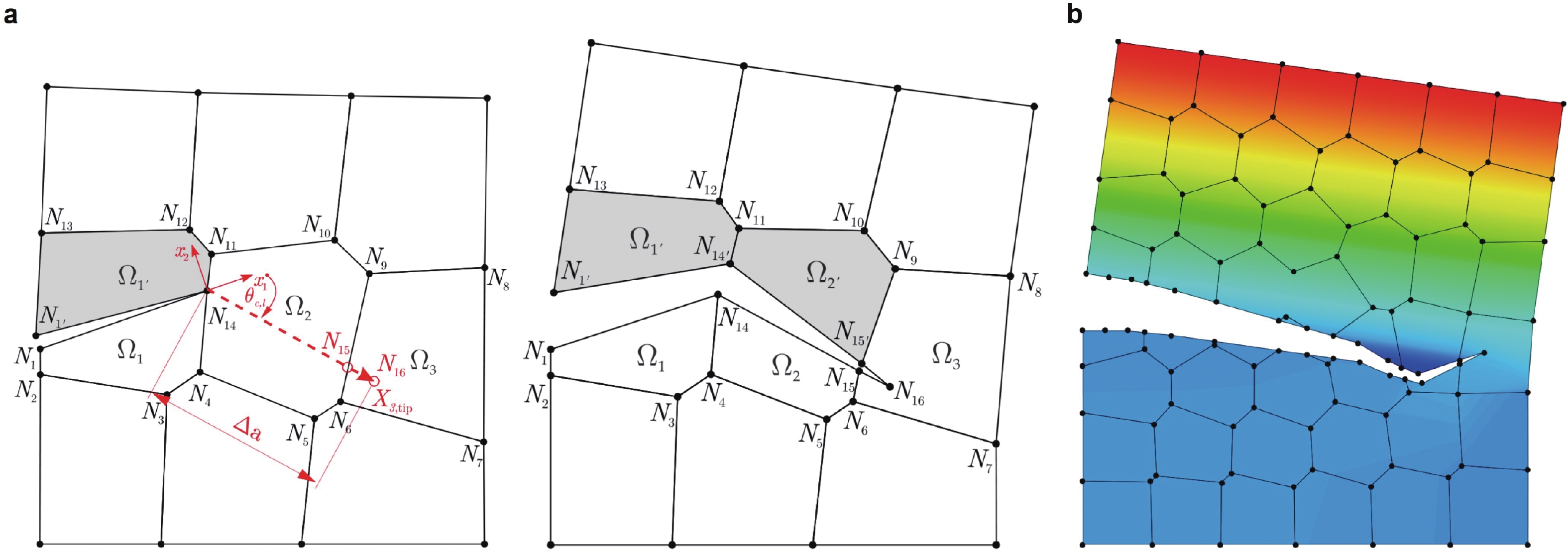
图 20 虚单元法在断裂问题中的应用. (a)单元切割, (b)裂纹扩展(修改自 (Hussein et al. 2019))
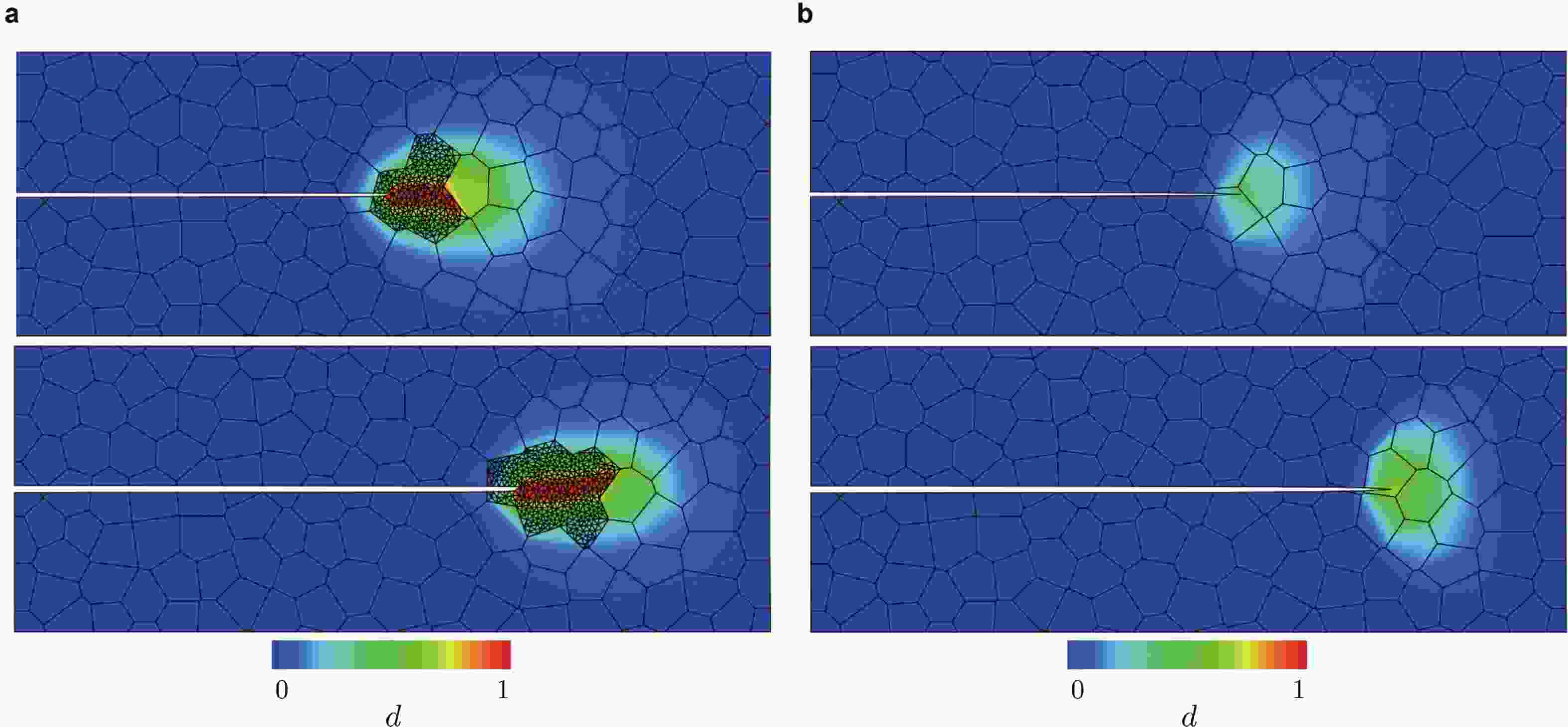
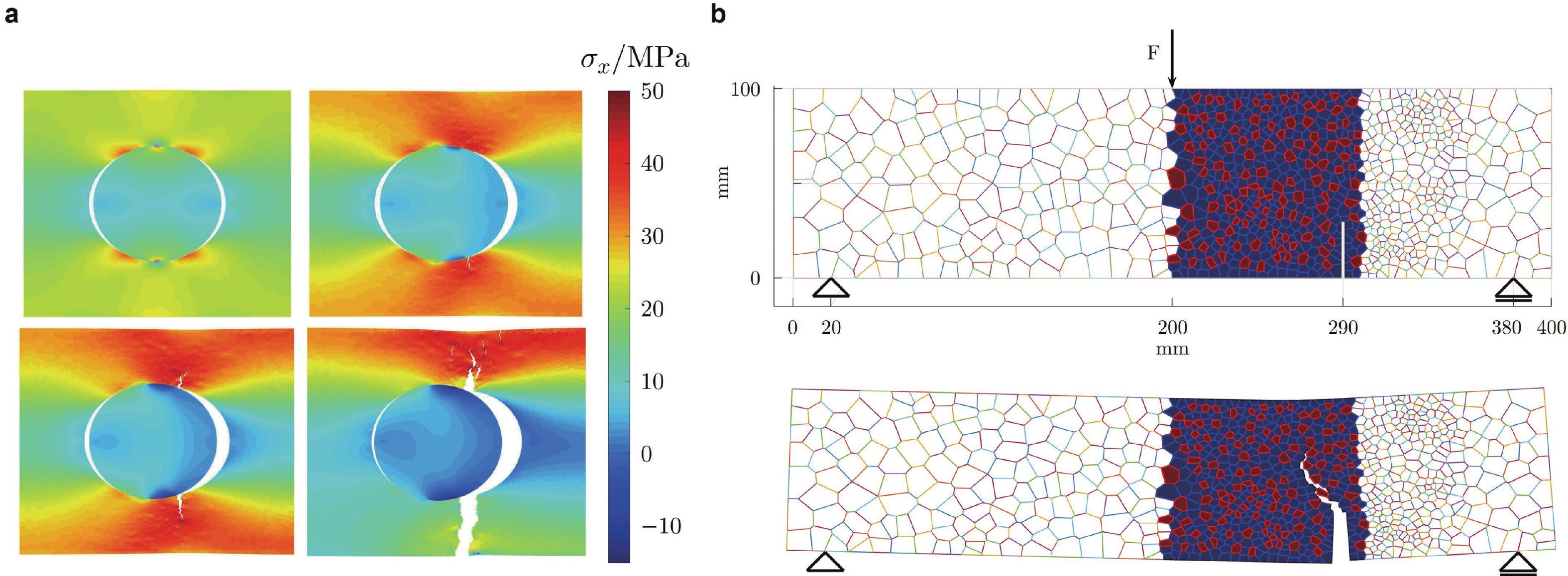
图 21 单元切割与自适性相场耦合模拟裂纹扩展. (a)自适应网格求解相场, (b)单元切割模拟裂纹扩展(修改自 (Hussein et al. 2020))
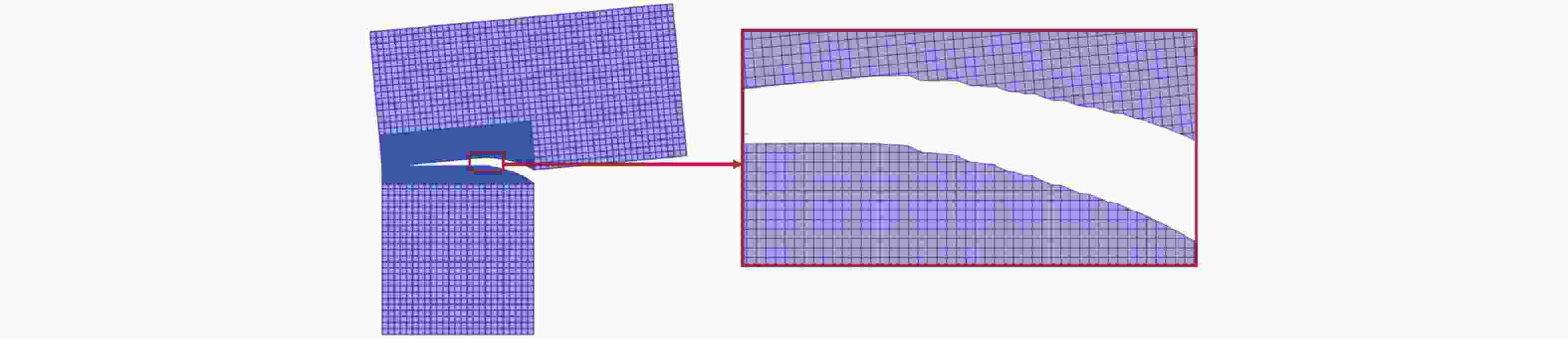
图 22 虚单元法与内聚力模型模拟 L 形状板的裂纹扩展(修改自 (Marfia et al. 2022))
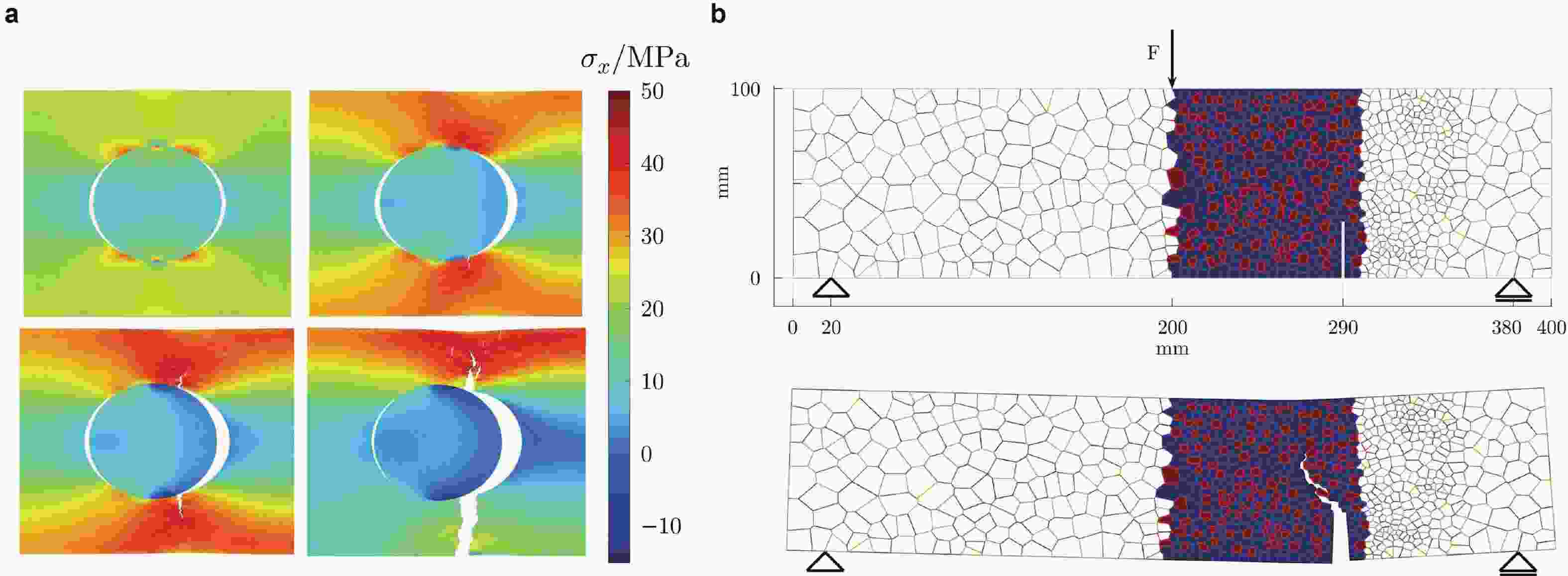
图 23 虚单元法与内聚力模型模拟耦合. (a)接触脱离模拟, (b)非均匀材料三点弯曲梁模拟(修改自 (Benedetto et al. 2018))
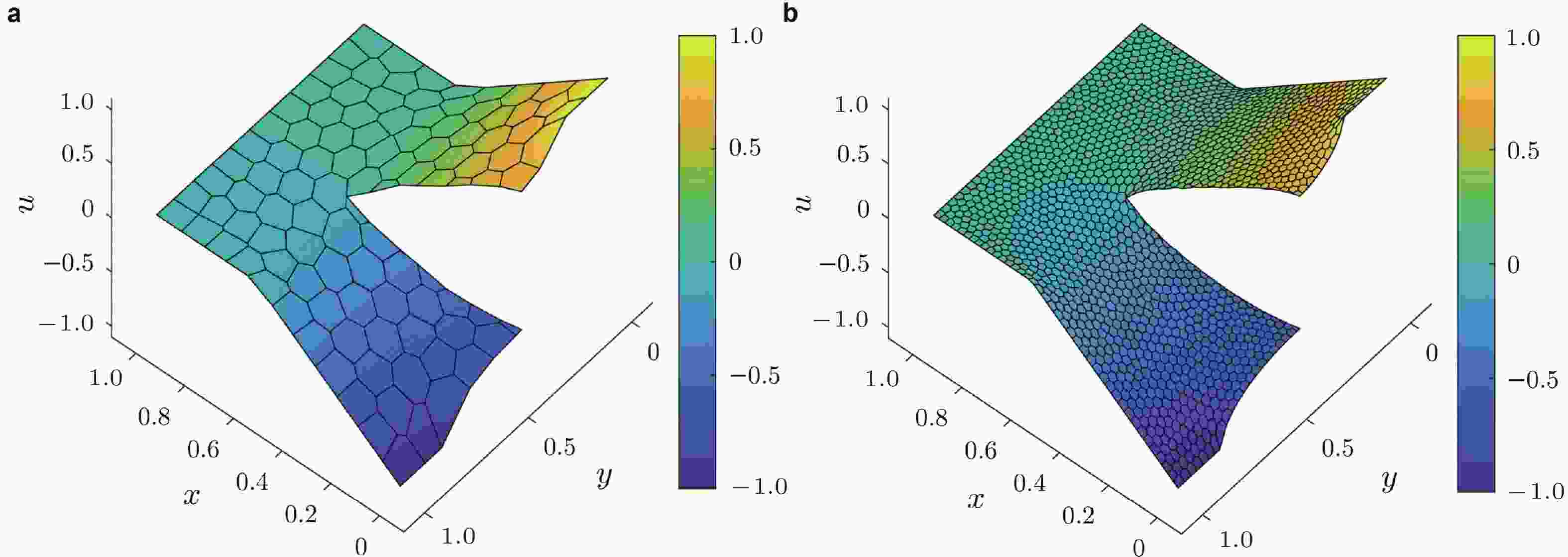
图 24 虚单元法与扩展有限元结合模拟含裂纹的薄膜在 III 型载荷作用下变形. (a)100 个网格, (b)1600个网格(修改自 (Benvenuti et al. 2019))
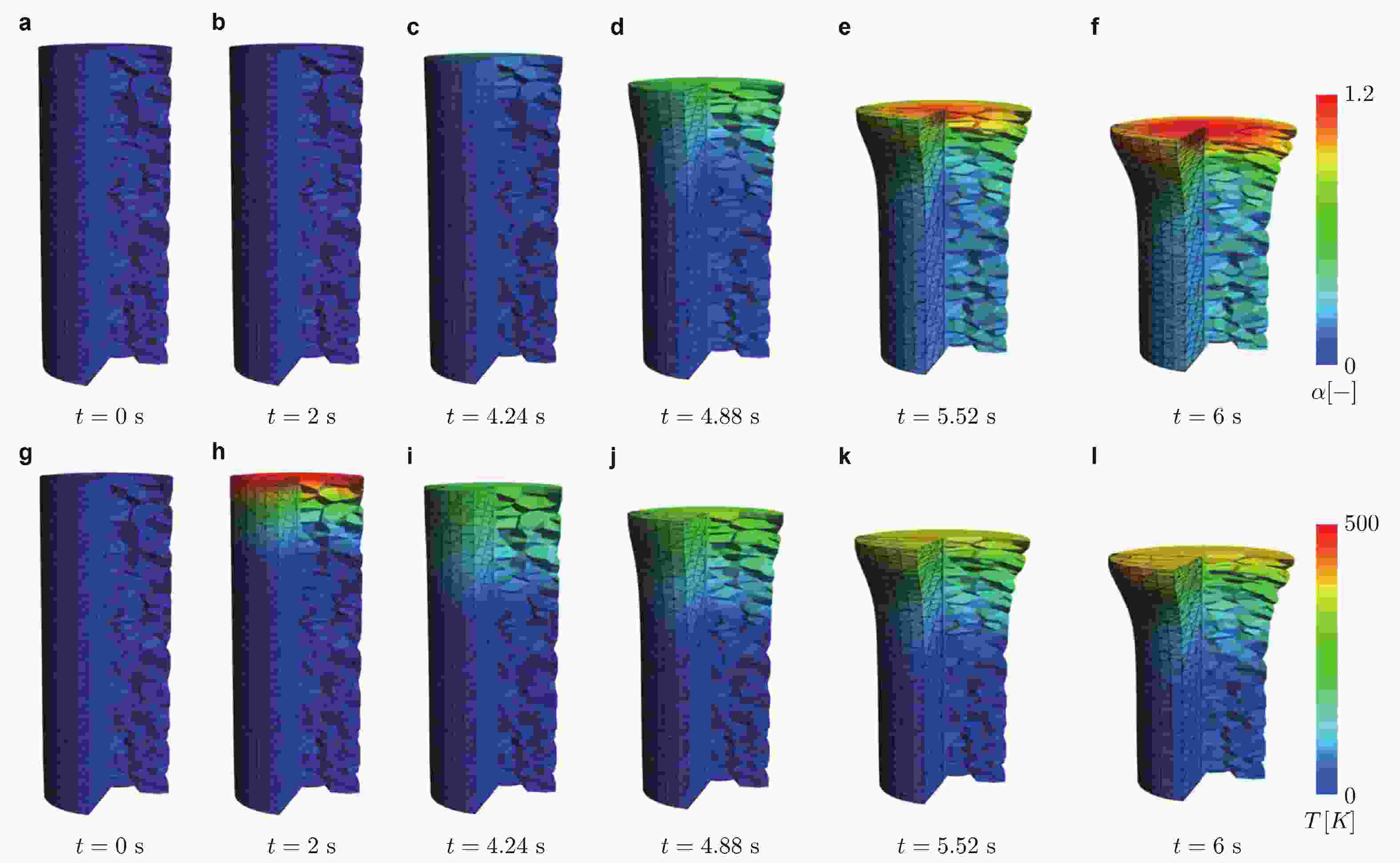
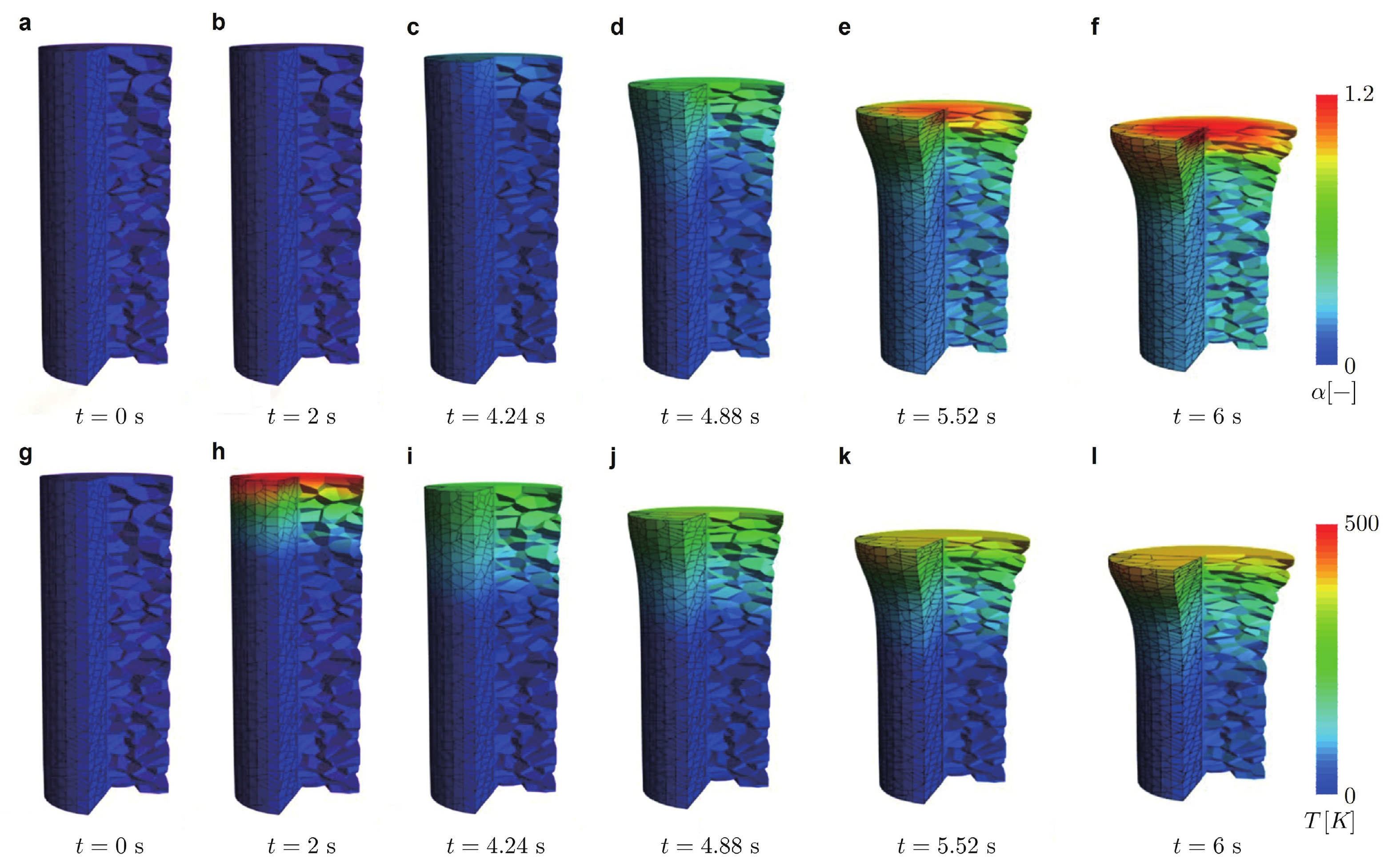
图 25 三维钢螺栓成型的热力耦合过程. (a)~(f)等效塑性应变, (g)~(l)绝对温度场
$ T $ (Aldakheel et al. 2019b)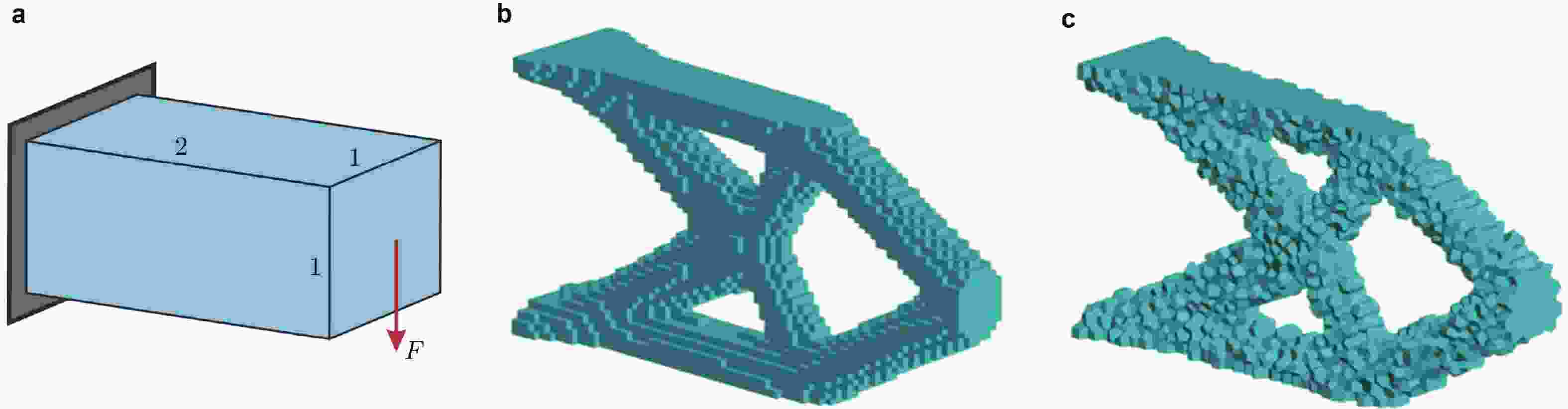
图 26 拓扑优化问题. (a)悬臂梁模型, (b)六面体网格, (c)非规则多面体网格(修改自 (Gain et al. 2015))
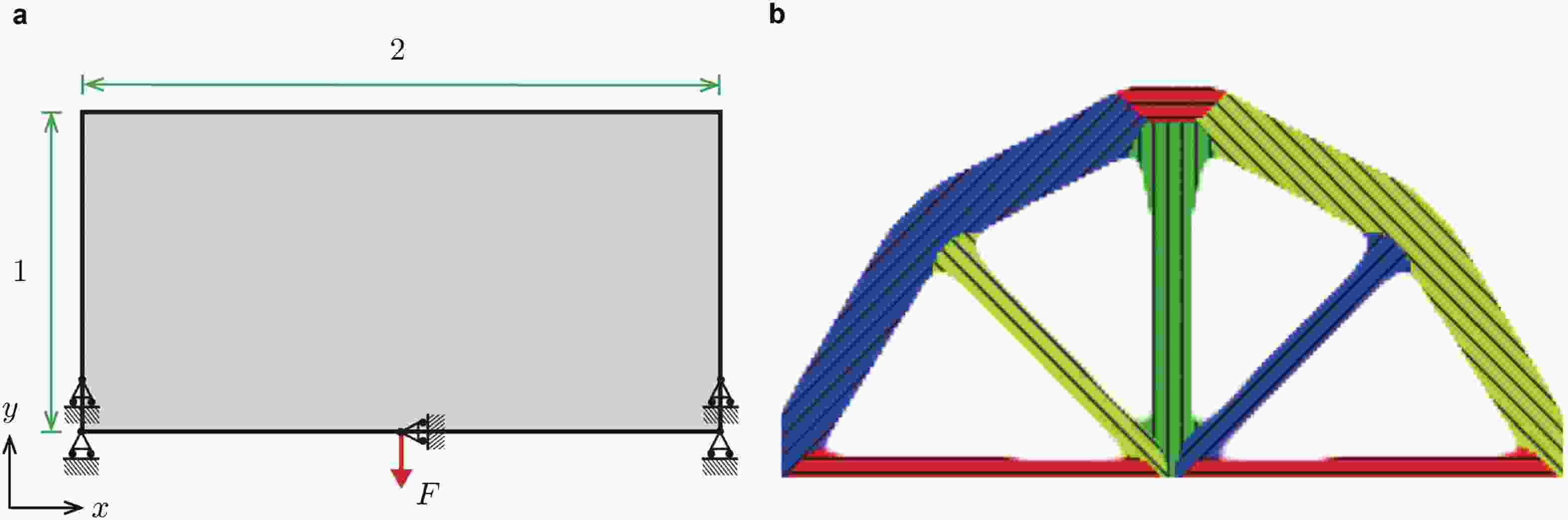
图 27 拓扑优化问题. (a)目标承载体, (b)优化结果(修改自 (Zhang et al. 2021))
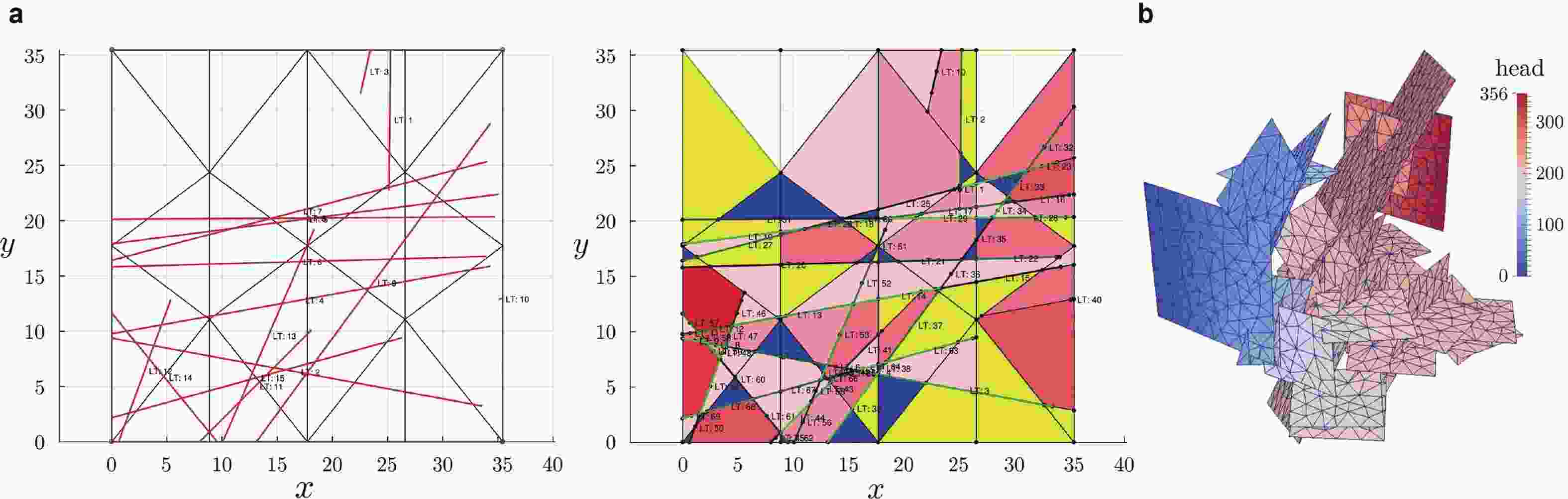
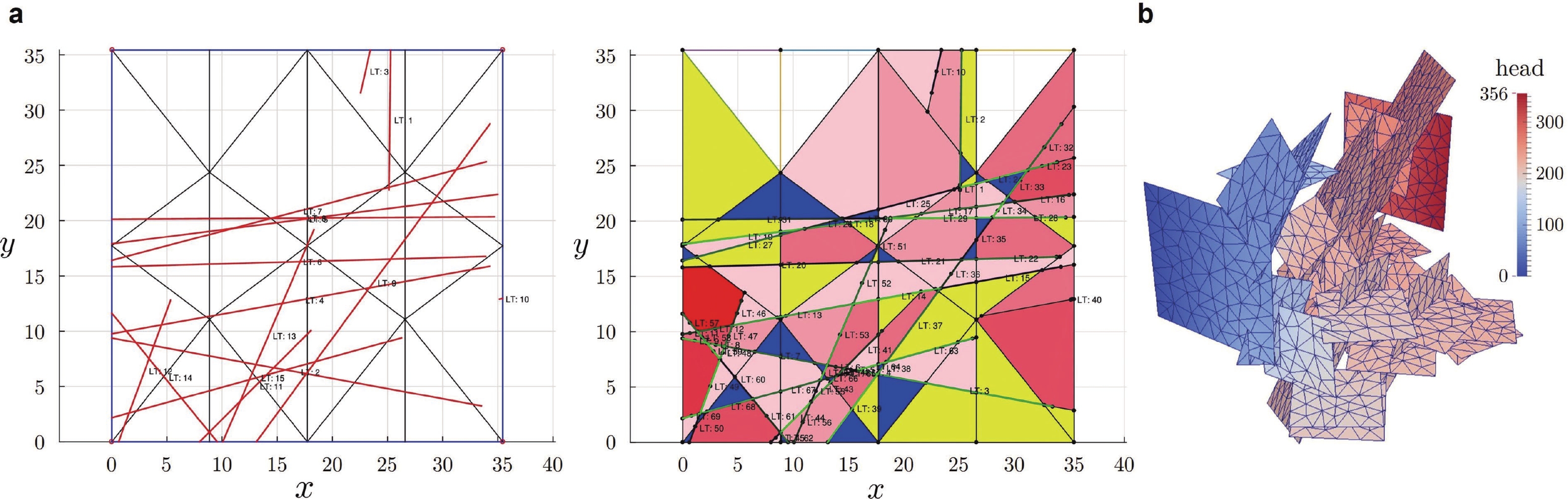
图 28 地下裂隙流体流动问题. (a)网格生成, (b)裂隙网络中水头分布(修改自 (Benedetto et al. 2016))
-
Aldakheel F, Hudobivnik B, Artioli E, Beirão da Veiga L, Wriggers P. 2020. Curvilinear virtual elements for contact mechanics. Computer Methods in Applied Mechanics and Engineering, 372: 113394. doi: 10.1016/j.cma.2020.113394 Aldakheel F, Hudobivnik B, Wriggers P. 2019a. Virtual element formulation for phase-field modeling of ductile fracture. International Journal for Multiscale Computational Engineering, 17: 181-200. doi: 10.1615/IntJMultCompEng.2018026804 Aldakheel F, Hudobivnik B, Wriggers P, 2019b. Virtual elements for finite thermo-plasticity problems. Computational Mechanics, 64: 1347–1360. Artioli E, Beirão da Veiga L, Dassi F. 2020. Curvilinear virtual elements for 2d solid mechanics applications. Computer Methods in Applied Mechanics and Engineering, 359: 112667. doi: 10.1016/j.cma.2019.112667 Artioli E, Beirão da Veiga L, Lovadina C, Sacco E. 2017a. Arbitrary order 2d virtual elements for polygonal meshes: Part i, elastic problem. Computational Mechanics, 60: 355-377. doi: 10.1007/s00466-017-1404-5 Artioli E, Beirão da Veiga L, Lovadina C, Sacco E. 2017b. Arbitrary order 2d virtual elements for polygonal meshes: Part ii, inelastic problem. Computational Mechanics, 60: 643-657. doi: 10.1007/s00466-017-1429-9 Behrens B A, Maier H J, Poll G, Wriggers P, Aldakheel F, Klose C, Nürnberger F, Pape F, Böhm C, Chugreeva A, et al. 2020. Numerical investigations regarding a novel process chain for the production of a hybrid bearing bushing. Production Engineering, 14: 569-581. doi: 10.1007/s11740-020-00992-7 Beirão da Veiga L, Brezzi F, Cangiani A, Manzini G, Marini L D, Russo A. 2013a. Basic principles of virtual element methods. Mathematical Models and Methods in Applied Sciences, 23: 199-214. doi: 10.1142/S0218202512500492 Beirão da Veiga L, Brezzi F, Marini L D. 2013b. Virtual elements for linear elasticity problems. SIAM Journal on Numerical Analysis, 51: 794-812. doi: 10.1137/120874746 Beirão da Veiga L, Brezzi F, Marini L D, Russo A. 2014. The hitchhiker's guide to the virtual element method. Mathematical Models and Methods in Applied Sciences, 24: 1541-1573. doi: 10.1142/S021820251440003X Beirão da Veiga L, Brezzi F, Marini L D, Russo A. 2016. Serendipity nodal vem spaces. Computers & Fluids, 141: 2-12. Beirão da Veiga L, Dassi F, Russo A. 2017a. High-order virtual element method on polyhedral meshes. Computers & Mathematics with Applications, 74: 1110-1122. Beirão da Veiga L, Lovadina C, Mora D. 2015. A virtual element method for elastic and inelastic problems on polytope meshes. Computer Methods in Applied Mechanics and Engineering, 295: 327-346. doi: 10.1016/j.cma.2015.07.013 Beirão da Veiga L, Lovadina C, Russo A. 2017b. Stability analysis for the virtual element method. Mathematical Models and Methods in Applied Sciences, 27: 2557-2594. doi: 10.1142/S021820251750052X Beirão da Veiga L, Russo A, Vacca G. 2019. The virtual element method with curved edges. ESAIM: Mathematical Modelling and Numerical Analysis, 53: 375-404. doi: 10.1051/m2an/2018052 Benedetto M F, Berrone S, Borio A, Pieraccini S, Scialò S. 2016. A hybrid mortar virtual element method for discrete fracture network simulations. Journal of Computational Physics, 306: 148-166. doi: 10.1016/j.jcp.2015.11.034 Benedetto M F, Borio A, Scialò S. 2017. Mixed virtual elements for discrete fracture network simulations. Finite Elements in Analysis and Design, 134: 55-67. doi: 10.1016/j.finel.2017.05.011 Benedetto M F, Caggiano A, Etse G. 2018. Virtual elements and zero thickness interface-based approach for fracture analysis of heterogeneous materials. Computer Methods in Applied Mechanics and Engineering, 338: 41-67. doi: 10.1016/j.cma.2018.04.001 Benvenuti E, Chiozzi A, Manzini G, Sukumar N. 2019. Extended virtual element method for the laplace problem with singularities and discontinuities. Computer Methods in Applied Mechanics and Engineering, 356: 571-597. doi: 10.1016/j.cma.2019.07.028 Benvenuti E, Chiozzi A, Manzini G, Sukumar N. 2022. Extended virtual element method for two-dimensional linear elastic fracture. Computer Methods in Applied Mechanics and Engineering, 390: 114352. doi: 10.1016/j.cma.2021.114352 Böhm C, Hudobivnik B, Aldakheel F, Wriggers P. 2021a. Modeling of single-slip finite strain crystal plasticity via the virtual element method. Proc. Appl. Math. Mech., 20: e202000205. Böhm C, Hudobivnik B, Marino M, Wriggers P. 2021b. Electro-magneto-mechanically response of polycrystalline materials: Computational homogenization via the virtual element method. Computer Methods in Applied Mechanics and Engineering, 380: 113775. doi: 10.1016/j.cma.2021.113775 Braess D. 2007. Finite elements: Theory, fast solvers, and applications in solid mechanics. Cambridge University Press Brenner S C, Scott L R. 2008. The mathematical theory of finite element methods. volume 15 of Texts in Applied Mathematics. Springer New York Chi H, Beirão da Veiga L, Paulino G. 2017. Some basic formulations of the virtual element method (vem) for finite deformations. Computer Methods in Applied Mechanics and Engineering, 318: 148-192. doi: 10.1016/j.cma.2016.12.020 Cihan M, Hudobivnik B, Aldakheel F, Wriggers P. 2021a. 3d mixed virtual element formulation for dynamic elasto-plastic analysis. Computational Mechanics, 68: 1-18. Cihan M, Hudobivnik B, Aldakheel F, Wriggers P. 2021b. Virtual element formulation for finite strain elastodynamics. Computer Modeling in Engineering & Sciences, 129: 1151-1180. De Bellis M L, Wriggers P, Hudobivnik B. 2019. Serendipity virtual element formulation for nonlinear elasticity. Computers & Structures, 223: 106094. Dhanush V, Natarajan S. 2019. Implementation of the virtual element method for coupled thermo-elasticity in abaqus. Numerical Algorithms, 80: 1037-1058. doi: 10.1007/s11075-018-0516-0 Gain A L, Paulino G H, Duarte L S, Menezes I F M. 2015. Topology optimization using polytopes. Computer Methods in Applied Mechanics and Engineering, 293: 411-430. doi: 10.1016/j.cma.2015.05.007 Gain A L, Talischi C, Paulino G H. 2014. On the virtual element method for three-dimensional linear elasticity problems on arbitrary polyhedral meshes. Computer Methods in Applied Mechanics and Engineering, 282: 132-160. doi: 10.1016/j.cma.2014.05.005 Gay Neto A, Hudobivnik B, Moherdaui T F, Wriggers P. 2021. Flexible polyhedra modeled by the virtual element method in a discrete element context. Computer Methods in Applied Mechanics and Engineering, 387: 114163. doi: 10.1016/j.cma.2021.114163 Hudobivnik B, Aldakheel F, Wriggers P. 2019. A low order 3d virtual element formulation for finite elasto–plastic deformations. Computational Mechanics, 63: 253-269. doi: 10.1007/s00466-018-1593-6 Hussein A, Aldakheel F, Hudobivnik B, Wriggers P, Guidault P A, Allix O. 2019. A computational framework for brittle crack-propagation based on efficient virtual element method. Finite Elements in Analysis and Design, 159: 15-32. doi: 10.1016/j.finel.2019.03.001 Hussein A, Hudobivnik B, Aldakheel F, Wriggers P, Guidault P A, Allix O. 2018. A virtual element method for crack propagation. Proc. Appl. Math. Mech., 18: e201800104. Hussein A, Hudobivnik B, Wriggers P. 2020. A combined adaptive phase field and discrete cutting method for the prediction of crack paths. Computer Methods in Applied Mechanics and Engineering, 372: 113329. doi: 10.1016/j.cma.2020.113329 Lo Cascio M, Milazzo A, Benedetti I. 2021. A hybrid virtual–boundary element formulation for heterogeneous materials. International Journal of Mechanical Sciences, 199: 106404. doi: 10.1016/j.ijmecsci.2021.106404 Marfia S, Monaldo E, Sacco E. 2022. Cohesive fracture evolution within virtual element method. Engineering Fracture Mechanics, 269: 108464. doi: 10.1016/j.engfracmech.2022.108464 Marino M, Hudobivnik B, Wriggers P. 2019. Computational homogenization of polycrystalline materials with the virtual element method. Computer Methods in Applied Mechanics and Engineering, 355: 349-372. doi: 10.1016/j.cma.2019.06.004 Mengolini M, Benedetto M F, Aragón A M. 2019. An engineering perspective to the virtual element method and its interplay with the standard finite element method. Computer Methods in Applied Mechanics and Engineering, 350: 995-1023. doi: 10.1016/j.cma.2019.02.043 Park K, Chi H, Paulino G H. 2019. On nonconvex meshes for elastodynamics using virtual element methods with explicit time integration. Computer Methods in Applied Mechanics and Engineering, 356: 669-684. doi: 10.1016/j.cma.2019.06.031 Park K, Chi H, Paulino G H. 2020. Numerical recipes for elastodynamic virtual element methods with explicit time integration. International Journal for Numerical Methods in Engineering, 121: 1-31. doi: 10.1002/nme.6173 Ralston A, Rabinowitz P. 2001. A first course in numerical analysis. Courier Corporation Reddy B D, van Huyssteen D. 2019. A virtual element method for transversely isotropic elasticity. Computational Mechanics, 64: 971-988. doi: 10.1007/s00466-019-01690-7 Taylor R L, Simo J C, Zienkiewicz O C, Chan A C H. 1986. The patch test—a condition for assessing fem convergence. International Journal for Numerical Methods in Engineering, 22: 39-62. doi: 10.1002/nme.1620220105 Timoshenko S P, Goodier J N. 1951. Theory of Elasticity. McGraw-Hill Book Company van Huyssteen D, Reddy B. 2021. A virtual element method for transversely isotropic hyperelasticity. Computer Methods in Applied Mechanics and Engineering, 386: 114108. doi: 10.1016/j.cma.2021.114108 Wriggers P, De Bellis M, Hudobivnik B. 2021a. A taylor–hood type virtual element formulations for large incompressible strains. Computer Methods in Applied Mechanics and Engineering, 385: 114021. doi: 10.1016/j.cma.2021.114021 Wriggers P, Hudobivnik B. 2017. A low order virtual element formulation for finite elasto-plastic deformations. Computer Methods in Applied Mechanics and Engineering, 327: 459-477. doi: 10.1016/j.cma.2017.08.053 Wriggers P, Hudobivnik B, Aldakheel F. 2020. A virtual element formulation for general element shapes. Computational Mechanics, 66: 963-977. doi: 10.1007/s00466-020-01891-5 Wriggers P, Hudobivnik B, Aldakheel F. 2021b. Nurbs-based geometries: A mapping approach for virtual serendipity elements. Computer Methods in Applied Mechanics and Engineering, 378: 113732. doi: 10.1016/j.cma.2021.113732 Wriggers P, Hudobivnik B, Korelc J. 2018a. Efficient low order virtual elements for anisotropic materials at finite strains, in: Advances in Computational Plasticity: A Book in Honour of D. Roger J. Owen. Springer International Publishing. Computational Methods in Applied Sciences, pp. 417–434 Wriggers P, Hudobivnik B, Schröder J. 2018b. Finite and virtual element formulations for large strain anisotropic material with inextensive fibers, in: Multiscale Modeling of Heterogeneous Structures. Springer International Publishing. Lecture Notes in Applied and Computational Mechanics, pp. 205–231 Wriggers P, Reddy B D, Rust W, Hudobivnik B. 2017. Efficient virtual element formulations for compressible and incompressible finite deformations. Computational Mechanics, 60: 253-268. doi: 10.1007/s00466-017-1405-4 Wriggers P, Rust W T. 2019. A virtual element method for frictional contact including large deformations. Engineering Computations, 36: 2133-2161. doi: 10.1108/EC-02-2019-0043 Wriggers P, Rust W T, Reddy B D. 2016. A virtual element method for contact. Computational Mechanics, 58: 1039-1050. doi: 10.1007/s00466-016-1331-x Zhang X S, Chi H, Paulino G H. 2020. Adaptive multi-material topology optimization with hyperelastic materials under large deformations: A virtual element approach. Computer Methods in Applied Mechanics and Engineering, 370: 112976. doi: 10.1016/j.cma.2020.112976 Zhang X S, Chi H, Zhao Z. 2021. Topology optimization of hyperelastic structures with anisotropic fiber reinforcement under large deformations. Computer Methods in Applied Mechanics and Engineering, 378: 113496. doi: 10.1016/j.cma.2020.113496 -







 下载:
下载:






















计量
- 文章访问数: 6984
- HTML全文浏览量: 3241
- PDF下载量: 1623
- 被引次数: 0